|
|
|
|
LANTURI CINEMATICE. MECANISME
1. LANTURI CINEMATICE
Lanturile cinematice reprezinta sisteme formate din elemente cinematice de diferite ranguri, legate intre ele in mod continuu prin cuple cinematice de diferite clase.
Intrucat toate elementele lanturilor sunt mobile, acestea pot fi folosite in tehnica numai daca li se fixeaza unul din elementele componente.
Clasificarea lanturilor cinematice se poate face dupa trei criterii: rangul elementelor componente, forma lantului si felul miscarii elementelor.
A). Dupa rangul elementelor cinematice componente, se deosebesc:
Lanturi cinematice simple, constituite din elemente de rang j < 2 (cele de rang j = 1 sunt elemente situate la extremitatea lantului, iar cele de rang j = 2 sunt interioare).
Lanturi cinematice complexe, care au in componenta lor cel putin un element de rang j > 3. Dintre aceste lanturi, o utilizare foarte larga in tehnica o au lanturile Watt si Stephenson.
B). Dupa forma lanturilor cinematice, se deosebesc:
Lanturi cinematice deschise, care cuprind elemente de rang minim (j min. = 1).
Lanturi cinematice inchise, formate din elemente cu rang minim (j min. = 2).
C). Dupa felul miscarii elementelor, se intalnesc:
Lanturi cinematice plane, ale caror elemente componente au miscari in planul lor sau in plane paralele.
Lanturi
cinematice spatiale, la care cel putin un element are o miscare intr-un plan
diferit de cel al celorlalte elemente.
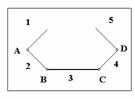
LANTURI CINEMATICE SIMPLE
(1, 5 - ELEMENT DE RANG J = 1; 2, 4 - ELEMENT DE RANG J = 2.)
2. FORMULA STRUCTURALA A LANTURILOR CINEMATICE PLANE.
Prin grad de libertate al unui lant cinematic se intelege numarul parametrilor scalari independenti, care definesc univoc pozitiile tuturor elementelor componente in raport cu unul din elementele lantului.
Mecanismele plane au in structura lor numai cuple de clasa a patra si cuple de clasa a cincea.
3. LANTURI CINEMATICE DESMODROME (DETERMINATE) SAU NEDESMODROME (NEDETERMINATE).
A). LANTUL DESMODROM
Lantul desmodrom este lantul la care, pentru o pozitie data unuia (sau unora) din elemente, numit conducator (sau conducatoare), in raport cu un element al lantului considerat fix, celelalte elemente ocupa pozitii bine determinate. Astfel, daca se imprima o miscare de rotatie elementului 1 in raport cu elementul 4 presupus fix, atunci elementele 2 si 3 vor ocupa pozitii perfect determinate in raport cu acelasi element 4, pentru orice deplasare a elementului 1. Rezulta ca desmodromia unui astfel de lant depinde de un singur parametru cinematic. Pozitiile celorlalte doua elemente (2 si 3) depinde de pozitia articulatiei C care, in orice moment, trebuie sa se gaseasca la distante constante de articulatiile B si D.
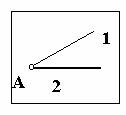
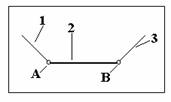
B). LANTUL NEDESMODROM
Lantul nedesmodrom este lantul la care, pentru o pozitie data unui element considerat conducator in raport cu un element presupus fix, celelalte elemente au pozitii nedeterminate. Pentru o miscare de rotatie imprimata elementului 1 in raport cu elementul 5 presupus fix, elementul 2 poate ocupa o infinitate de pozitii. Nedesmodromia se ridica fie daca se imprima o miscare de rotatie independenta si simultana elementului 4, fie daca se mai adauga un element de legatura 6 intre elementele 1 si 4, lantul devenind lant Stephenson cu sase elemente.
4. MECANISME.
Mecanismele sunt lanturi cinematice desmodrome cu un element fix (sau considerat fix) al caror grad de mobilitate este egal cu numarul elementelor conducatoare.
Mecanismele-motor se definesc a fi mecanismele carora li se precizeaza elementul conducator (sau elementele conducatoare). Prin urmare dintr-un lant cinematic rezulta, prin operatia de fixare a unui element, atatea mecanisme distincte cate elemente neidentice structural are lantul, iar dintr-un mecanism se obtin mai multe mecanisme-motor in functie de elementul care devine conducator (sau elementele care devin conducatoare).
Mecanismele pot fi formate atat din lanturi cinematice deschise (robotii industriali), cat si din cele inchise (transmisiile mecanice).
Prin gradul de mobilitate al unui mecanism se intelege numarul posibilitatilor sale de miscare sau al gradelor de libertate al elementelor mobile in raport cu elementul fix. Pentru a se determina gradul de mobilitate M3 al mecanismelor plane se porneste de la observatia ca, prin fixarea unui element cinematic al lantului, se mai suprima trei grade de libertate. Deci:
M3 = L3 - 3 = 3e - 2c5 - c4 - 3 = 3(e - 1) - 2c5 - c4
Introducand notatia:
n = e - 1
unde n reprezinta numarul elementelor cinematice mobile ale lantului, se obtine expresia gradului de mobilitate al mecanismelor plane (formula Grubler - Cebsev):
M3 = 3n - 2c5 - c4
Se mentioneaza ca, in tehnica, numarul cel mai mare de mecanisme plane il reprezinta mecanismele cu un singur grad de mobilitate (M3 = 1
Determinarea gradului de mobilitate al mecanismului este o operatie obligatorie deoarece valoarea sa arata daca mecanismul functioneaza (M > 0) sau nu (M < 0) si indica numarul elementelor conducatoare necesare indeplinirii conditiei de desmodromie.