|
|
|
|
Prezentarea generala a automatelor programabile
1 Generalitati
1.1 Dezvoltarea in timp a automatelor programabile
La sfarsitul anilor 1960 automatele programabile au fost pentru prima oara introduse. Motivul principal pentru realizarea unui astfel de aparat a fost eliminarea costurilor mari necesare pentru a inlocui complicatul sistem de control al masinilor bazat pe relee. Bedford Associates (Bedford, Massachusets) au propus ceva intitulat Controler Modular Digital (MODICON) unui mare producator de autovehicule din SUA. Alte companii atunci au propus scheme bazate pe computere, una din ele fiind bazata pe PDP-8. MODICON 084 a fost primul automat programabil produs pentru comercializare.
Cand nevoile de productie s-au schimbat, acelasi lucru s-a intamplat si cu sistemul de control. Acesta devine foarte scump cand schimbarea este frecventa. Deoarece releele sunt dispozitive mecanice ele au o viata limitata ce necesita o respectare stricta a programelor de intretinere. Defectiunile erau destul de problematice cand atat de multe relee erau folosite. Imaginati-va un panou de comanda a unei masini ce include multe, poate sute sau mii de relee individuale. Dimensiunea poate intrece imaginatia. Ce ziceti de legarea initiala a atat de multe dispozitive! Existau probleme? Bineinteles!
Aceste "controlere noi" trebuiau sa fie usor de programat de inginerii fabricii si cei de intretinere. Durata de viata trebuia sa fie lunga si schimbarile de program sa fie usor de realizat. Trebuiau de asemenea sa reziste durului mediu industrial. Acestea sunt niste cerinte destul de mari! Rezultatul a fost utilizarea unei tehnici de programare cu care majoritatea oamenilor era deja familiarizata si inlocuirea partilor mecanice cu altele mai solide.
La mijlocul anilor 70 tehnologiile automatelor programabile au fost masinariile secventiale si bazate pe procesoare. AMD-urile 2901 si 2903 au fost foarte populare in automatele Modicon si A-B. Microprocesoarele conventionale
nu aveau puterea sa rezolve rapid logica automatelor programabile in mare dar se puteau folosi la cele mai mici dintre ele. Cu evolutia microprocesoarelor conventionale au aparut automate programabile din ce in ce mai mari bazate pe ele. Oricum, chiar si azi cateva sunt inca bazate pe 2903(A-B PLC3). Modicon n-a construit un automat mai rapid decat 984A/B/X care a fost bazat pe 2901.
Abilitatile de comunicare au inceput sa apara cam in 1973. Primul astfel de sistem a fost Modbus de la Modicon. Automatele pot comunica cu alte automate programabile si puteau fi departe de masinaria pe care o controlau. Puteau fi folosite de asemenea pentru a trimite si primi voltaje variate pentru a le permite sa intre in lumea analogica. Din nefericire, lipsa standardizarii impreuna cu tehnologia in continua schimbare a facut ca comunicarea intre automate sa devina un cosmar de protocoale incompatibile si retele fizice. Si totusi a fost o decada foarte reusita pentru automatele programabile.
Anii 80 au adus o incercare de standardizare a comunicatiilor cu Protocolul Manufacturii Automatizate (MAP) de la General Motors. A fost si perioada in care s-au redus dimensiunile automatelor programabile si introducerea programarii soft-ului prin programarea simbolica pe PC-uri in loc de terminalele de programare sau dispozitivele de programare. Astazi, cel mai mic automat programabil este de dimensiunea unui singur releu de control!
Anii 90 au vazut o reducere graduala a introducerii de noi protocoale si modernizarea structurii fizice a catorva dintre cele mai populare protocoale care au supravietuit anilor 1980. Ultimul standard a incercat sa uneasca limbajul de programare a automatelor sub un standard international. Acum avem automate care sunt programabile cu ajutorul Grafcet-urilor, a listei de instructiuni, C-ului si textului structurat, toate in acelasi timp! PC-urile sunt de asemenea folosite pentru a inlocui automatele in anumite aplicatii. Compania initiala care a realizat MODICON 084 a trecut la realizarea unui sistem de control bazat pe PC.
2 Teoria operatiei
Un sistem de comanda programabil consta in mod tipic dintr-un automat programabil , ca si din senzori, elemente de actionare si elemente de semnalizare.
Automatul programabil insusi consta in principal din modulul unitate centrala (CPU) cu procesor si memorie de program, module de intrare/ iesire, sistemul de magistrala si modulul de alimentare.
Semanlele de tensiune generate de senzori sunt aplicate direct la terminalele modulului de intrare (intrari in automatul programabil).
Porcesorul din modulul CPU executa programul stocat in memorie si scaneaza intrarile automatului pentru a detecta prezenta sau absenta tensiunii. Depinzand de starile intrarilor si de programul memorat, procesorul comanda modului de iesire sa aplice tensiuni la terminalele de iesire respective.
Nivelele de tensiune la aceste iesiri ale automatului activeaza sau dezactiveaza elementele de actionare, elementele de semnalizare, etc.
Magistrala de sistem este o cale pentru transmisia semnalelor. In automatul programabil, ea raspunde de schimbul de semnale intre procesor si modulele de intrare/ iesire.
Magistrala cuprinde mai multe linii de semnal paralele:
magistrala de adrese, care selecteaza adresele (locatii de memorie) ale modulelor;
magistrala de date, care transfera date (continuturi ale locatiilor de memorie), de exemplu de la modulele de intrare la cele de iesire.
Magistrala de comenda, care transporta semnale de ocmanda si de sincronizare pentru sincronizarea activitatilot CPU in automatulprogramabil.
Modulul sursa de alimentare genereaza tensiuni interne de la alimentarea generala, pentru alimentarea modulelor electronice din automatul programabil. Marimea acestei tensiuni este de 5V.
Procesorul automatului programabil scaneaza intrarile pentru "tensiune prezenta" si, depinzand de programul inmagazinat si de rezultatul operatiei de scanare, elementele de executie sunt comutate "ON" sau "OFF".
Ambele stari sunt clar deosebite. Urmatoarea terminologie este utilizata pentru sistemele electronice de comanda:
STARE SEMNAL "0" = TENSIUNEA ABSENTA = OFF
STARE SEMNAL "1" = TENSIUNEA PREZENTA = ON
Aceste stari ale semnalelor corespund la doua valori posibile ale unui semnal binar . Termenul "semnal binar" este utilizat nu numai pentru a descrie starile intrarilor si iesirilor, ci si stari ale acelor elemente care sunt raspunzatoare de prelucrarea semnalelor in automatul programabil.
Intr-un automat programabil , starile semanlelor a opt intrari sau opt iesiri sunt combinate pentru a forma un "octet de intrare" (IB = Input Byte) sau un "octet de iesire " (QB ). Fiecare cifra binara a unui octet are valoare "0" sau "1". In automatul programabil se prelucreaza in mod obisnuit intregul octet, adica toti cei opt biti impreuna.
Combinatia a 16 cifre binare consecutive constituie un cuvant. Starile semnalelor a 16 intrari sau iesiri ale unui automat programabil pot fi combinate pentru aforma un "cuvant de intrare" (IW = Input Word) sau un "cuvant de iesire" (QW = Output Word).Pentru a face accesibil fiecare bit individual dintr-un octet, se aloca o adresa de bit pentru fiecare bit. Bitului din extrema dreapta a unui octet I se aloca adresa de bit "0", iar celui din extrema stanga adresa de bit "7".
Octetii individuali sunt de asemenea accesati prin numere, adica adrese de octet. Bitii individuali sunt identificati in mod unic de o combinatie de adrese de octet si de bit, cele doua fiind separate printr-un punct. Adresa de octet este in stanga punctului, iar adresa de bit in dreapta punctului.
Adresa de cuvant este formata prin numararea cuvintelor. IW2, de exemplu, identifica cuvantul de intrare 2 cuprinzand octetii de intrare 2 si 3.
3 Numaratoare
Un numarator este un simplu dispozitiv ce trebuie sa faca un singur lucru - sa numere.
Exista trei feluri de numaratoare:
numaratoare crescatoare;
numaratoare descrescatoare:
numaratoare mixte.
Numaratoarele normale de mai sus sunt de obicei numaratoare "software". Cu alte cuvinte, ele nu exista fizic in automatul programabil ci sunt simulate in softul acestuia.
Numaratoarele
hardware exista in automat si nu sunt dependente de timpul de
scanare.
O buna regula de numarare este sa folosim
numaratoarele normale (software)
daca impulsurile pe care le numaram nu vin mai rapid decat 2X timpul de scanare. (de ex. daca timpul de scanare este 2ms si impulsurile vin la 4ms sau mai tarziu atunci folosim numaratoare software. Daca insa sosesc mai rapid de 4ms (3ms de exemplu) atunci folosim numaratoare hardware (de mare viteza). (2xtimpul de scanare = 2x2ms = 4ms).
Ca sa le folosim trebuie sa cunostem 3 lucruri:
1. De unde vin impulsurile pe care dorim sa le numaram. De obicei vin de la una din intrari (un senzor conectat la intrarea 0000 de exemplu).
2. Cate impulsuri dorim sa numaram inainte sa reactionam. Sa numaram 5 mingii, inainte sa le ambalam, de exemplu.
3. Cand/cum vom reseta numaratorul ca sa numere din nou. Dupa ce numaram 5 mingii sa resetam numaratorul, de pilda.
Cand programul ruleaza in automatul programabil de obicei afiseaza valoarea curenta sau "acumulata" pentru ca sa vedem valoarea curenta din numarare. Numaratoarele tipice pot numara de la 0 la 9999.
Primul este linia de
resetare. Cand aceasta intrare este pornita valoarea curenta
(acumulata) de numarare se va intoarce la zero.
A doua intrare este adresa de unde vin impulsurile pe care le
numaram. De exemplu, daca numaram cate mingii trec
prin fata senzorului care este fizic conectat la intrarea 0001 atunci
trebuie sa punem contacte normal deschise cu adresa 0001 in fata
liniei de impulsuri.
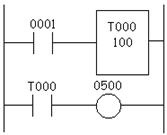
Cxxx este numele numaratorului. Daca vrem sa-l numim numaratorul 000 atunci vom pune "C000" acolo. yyyyy este numarul de impulsuri pe care vrem sa le numaram inainte de a face ceva. Daca dorim sa numaram 5 mingii inainte de a porni o iesire fizica pentru a le ambala, atunci acolo vom pune 5.
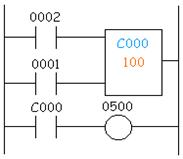
Aici este simbolul pe o scara ce ne arata cum sa setam un numarator (pe care il vom numi numaratorul 000) sa numere 100 de mingii de la intrarea 0001 inainte de a porni iesirea 0500. Senzorul 0002 reseteaza numaratorul.
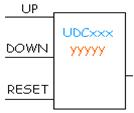
La acest contor crescator-descrescator ne trebuie sa stabilim 3 intrari. Intrarea de resetare are aceeasi functie ca mai sus. Insa, in loc sa avem doar o intrare pentru numararea impulsurilor acum avem 2. Una este pentru numararea crescatoare iar cealalta este pentru numararea descrescatoare.
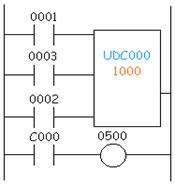
In acest exemplu ii vom zice numaratorului UDC000 si ii vom da o valoare presetata de 1000. (Vom numara 1000 de impulsuri). Pentru intrari vom folosi un senzor ce porneste intrarea 0001 cand vede o tinta si un alt senzor la intrarea 0003
care de asemenea o porneste cand vede o tinta. Cand intrarea 0001 este pornita numaram crescator iar cand intrarea 0003 este pornita numaram descrescator. Cand ajungem la 1000 de impulsuri vom porni iesirea 500.
4 Temporizatoare
Temporizatorul este o instructiune ce asteapta un timp predefinit inainte de a face ceva.
Tipuri de temporizatoare :
Temporizator On-Delay - Acest tip de temporizator porneste "un timp de intarziere". Cu alte cuvinte, dupa ce senzorul nostru (intrarea) porneste asteptam x secunde inainte de a activa un solenoid (iesire). Acesta este cel mai comun temporizator.
Temporizator Off - Delay - Acest tip de temporizator este opusul temporizatorului on-delay de mai sus. Acest temporizator "amana oprirea". Dupa ce senzorul (intrarea) vede o tinta porneste un solenoid (iesire). Cand senzorul nu mai vede tinta, tinem solenoidul pornit pentru inca x-secunde inainte de al opri. Acest tip este mai putin utilizat decat cel "on-delay" de mai sus.
Temporizator cu retinere sau cu acumulare Acest tip de temporizator necesita 2 intrari. O intrare porneste cronometrarea si cealalta o reseteaza.
Temporizatoarele de mai sus vor fi resetate daca senzorul de intrare nu este pornit/oprit pentru intreaga durata a temporizarii. Acest temporizator insa tine
sau retine timpul cumulat cand senzorul este oprit in timpul lucrului. De exemplu, dorim sa stim cat timp un senzor este pornit pe timpul unei ore. Daca folosim unul din temporizatoarele de mai sus acestea se vor reseta de fiecare data cand senzorul se opreste/porneste. Acest temporizator insa, ne va da un timp cumulat total.
Pentru a sti cum sa utilizam temporizatoarele trebuie sa cunoastem doua lucruri:
ce va porni temporizatorul (de obicei este una din intrari)?
cat timp vom sta pana sa reactionam (sa stam 5s inainte de a porni un solenoid)?
Cand intructiunile dinainte de simbolul temporizatorului sunt adevarate, temporizatorul incepe sa functioneze. Cand timpul se acumuleaza temporizatorul isi inchide contactele. Cand programul ruleaza in automatul programabil, acesta de obicei afiseaza timpul acumulat pentru ca noi sa vedem valoarea curenta. In mod normal temporizatoarele pot "ticai" de la 0 la 9999.
Fiecare tact este echivalent cu x secunde.
De obicei fiecare fabricant ofera mai multe tipuri de tacturi. Majoritatea fabricantilor ofera incrementari de 10 si 100ms (tacturi de ceas). Cativa fabricanti ofera de asemenea incrementari de 1 ms ca si de o secunda. Aceste temporizatoare cu incrementare diferita functioneaza ca cele de mai sus dar cateodata au nume diferite pentru a descrie baza lor de timp. Unele sunt temporizatoare de mare viteza, altele de foarte mare viteza sau temporizatoare rapide cu acumulare.
Acest temporizator este de tipul "on delay" si este numit Txxx. Cand intrarea este pornita, temporizatorul incepe sa ticaie. Cand a ticait de yyyyy (valoarea presetata) ori, va porni contactele sale pe care le folosim mai tarziu in program.
Mai jos este simbolul aratat intr-o diagrama scara:
In aceasta diagrama asteptam intrarea 0001 sa fie pornita. Cand este pornita, temporizatorul T000 (un temporizator de 100ms) incepe sa ticaie. Va ticai de 100 de ori. Fiecare tact (incrementare) este de 100ms astfel incat temporizarea va fi de 10000ms (10 secunde). 100 de tacturi x 100ms = 10000ms. Cand 10 secunde au trecut, contactele T000 se inchid si 500 este pornit. Cand intrarea 0001 se opreste (fals) temporizatorul T000 va fi resetat la 0 cauzand deschiderea contactelor sale (fals) deci pricinuind inchiderea iesirii 500.
Un temporizator cu acumulare va arata simular cu aceasta:
Acest temporizator este numit Txxx. Cand intrarea de activare este in functiune temporizatorul incepe sa ticaie. Cand ticaie de yyyyy ori (valoarea presetata), va inchide contactele sale pe care le vom folosi mai tarziu in program. Daca totusi, intrarea de activare se opreste inainte ca temporizarea sa se termine, valoarea curenta va fi retiunuta. Cand intrarea este din nou pornita,
temporizatorul va continua de unde a ramas. Singura cale ca sa fortam temporizatorul inapoi la valoarea sa presetata este sa pornim intrarea de resetare.
Simbolul este aratat in diagrama scara de mai jos.
In aceasta diagrama asteptam ca intrarea 0002 sa fie pornita. Cand acest lucru se intampla temporizatorul T000 (un temporizator cu incrementare de 10ms) incepe
sa ticaie. Va ticai de 100 de ori. Fiecare tact (increment) este de 10ms astfel incat temporizarea va fi de 1000ms (o secunda). 100 tacturi x 10ms = 1000ms. Cand o secunda a trecut, contactele T000 se inchid si 500 este pornit. Daca intrarea 0002 este oprita timpul scurs va fi retinut. Cand 0002 este din nou pusa in functiune temporizatorul va continua de unde a ramas. Cand intrarea 0001 va fi pornita (adevarata) temporizatorul T000 va fi resetata inapoi la 0 cauzand deschiderea contactelor sale (fals) rezultand oprirea iesirii 500.
Un lucru important de retinut este ca numaratoarele si temporizatoarele nu pot avea acelasi nume (in majoritatea automatelor programabile). Aceasta pentru ca ele de obicei folosesc aceleasi registre.
Intotdeauna amintiti-va ca, desi simbolurile pot arata diferit ele actioneaza in acelasi fel. De obicei diferenta majora se afla in durata tacturilor de incrementare.
In general, exista doua tipuri de erori cand utilizam un temporizator. Primul tip este eroarea de intrare. Celalalt este eroarea de iesire. Eroarea totala este suma ambelor erori.
Eroarea de intrare - O eroare apare depinzand de momentul din ciclul de scanare in care intrarea temporizatorului este pornita. Cand intrarea este pornita imediat dupa ce automatul programabil verifica starea intrarilor in timpul
ciclului de scanare, eroarea de intrare va fi cea mai mare (mai mult de un timp de scanare). Aceasta deoarece, dupa cum va veti aminti, intrarile sunt verificate o singura data in timpul unei scanari. Daca n-a fost pornita cand automatul se uita la intrari ci este pornita mai tarziu avem evident o eroare. Mai departe trebuie sa asteptam pana cand instructiunea de temporizare este executata in timpul partii de rulare a programului din scanare. Daca intructiunea de temporizare este ultima instructiune de pe treapta poate fi o eroare destul de mare?
Eroarea de iesire - O alta eroare apare depinzand locul pe scara in care temporizatorul "expira" si cand automatul termina de executat programul ca sa ajunga la partea din ciclu in care reface intrarile. Aceasta pentru ca temporizarea
se termina in timpul executiei programului dar automatul trebuie sa termine de executat restul programului inainte de a porni iesirea care trebuie activata.
5 Operatiile automatelor programabile
Aceste operatii de baza includ in mod obisnuit functiile AND (SI), OR(SAU) si XOR (Sau exclusiv). Fiecare este descrisa mai jos.
AND- Aceasta functie ne lasa sa folosim tabela de adevar de mai jos. Aici putem vedea ca functia AND este inrudita cu inmultirea. Vedem aceasta pentru ca singura data cand rezultatul este adevarat (1) este atunci cand ambii operatori A si B sunt adevarati (=1).
Instructiunea AND este folositoare atunci cand automatul vorstru nu are o functie de mascare. O functie de mascare da voie unui bit intr-un registru sa fie "lasat in pace" cand lucram la nivel de bit. Aceasta pentru ca fiecare bit care este AND-at cu sine insusi va ramane la valoarea care o are initial.
Observati tabela de adevar de mai jos pentru a intelege aceasta (1 AND 1 = 1, 0 AND 0 = 0)
Rezultat = A AND B
A
B
Rezultat
0
0
0
1
0
0
0
1
0
1
1
1
OR- Aceasta functie se bazeaza pe tabela de adevar de mai jos. Aici putem vedea ca functia OR este foarte mult inrudita cu adunarea. Vedem aceasta pentru ca singura data cand rezultatul este adevarat (=1) este cand operatorul A sau B este adevarat (=1). Evident, cand sunt ambii adevarati rezultatul este adevarat.
Rezultat = A OR B
A
B
Rezultat
0
0
0
1
0
1
0
1
1
1
1
1
XOR- Aceasta functie ne lasa sa folosim tabela de adevar de mai jos. Astfel putem vedea ca functia XOR nu este inrudita cu nici o operatie matematica uzuala. O modalitate usoara de a retine rezultatele acestei functii este sa ne gandim ca A si B trebuie sa fie inversa celeilalte. Daca sunt ambele la fel (A=B) atunci rezultatul este fals (=0).
Aceasta este cateodata folositor cand dorim sa comparam bitii din 2 registre si sa subliniem ce biti sunt diferiti. Mai este necesar atunci cand calculam diferite sume de control. O suma de control este de obicei folosita ca o verificare de erori in protocoalele de transmisiuni
Rezultat = A XOR B
A
B
Rezultat
0
0
0
1
0
1
0
1
1
1
1
0
Multe sisteme de numeratie sunt folosite de automatul programabil. Binar si Zecimalul Codat Binar sunt populare in timp ce sistemele octale si hexazecimale sunt de asemenea comune.
Sa consideram urmatoarea formula:
Nbase= Ddigit * Runit + . D1R1 + D0R0
unde D=valoarea digitului si R= numarul de simboluri digitale folosite in sistemul de numeratie dat.
Zecimal- Acesta este sistemul de numeratie pe care il folosim in viata de zi cu zi. Ne putem gandi la acesta ca fiind numeratia in baza 10. Mai poate fi numit baza10 pentru ca fiecare digit poate avea 10 stari diferite (0-9). Din moment ce acesta nu este usor de implementat intr-un sistem electronic, este extrem de rar folosit.
Binar- Acesta este sistemul de numeratie pe care calculatoarele si automatele programabile il folosesc. A fost mult mai usor de realizat un sistem in care doar 2 numere (0 si 1) sunt manipulate (folosite). Sistemul binar foloseste acelasi principiu de baza ca si cel zecimal. In zecimal avem 10 digiti (0-9).
In binar avem doar 2 digiti (0 si 1). In zecimal numaram: 0,1,2,3,4,5,6,7,8,9 si in loc sa ne intoarcem inapoi la zero, pornim un nou digit si apoi plecam de la 0 in locatia originala a digitului
Formula de conversie generala :
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de binare pentru referinta. Randul de sus arata puterile lui 2 pe cand randul de jos arata valoarea zecimala echivalenta.
Conversiile numerelor binare
215
214
213
212
211
210
29
28
27
26
25
24
23
22
21
20
32768
16384
8192
4096
2048
1024
512
256
128
64
32
16
8
4
2
1
Octal- Sistemul de numeratie binar cere o multitudine de digiti pentru a reprezenta un numar mare. Luati in considerare numarul binar 11111111 este doar zecimalul 257. Un numar zecimal ca 1000000 ar necesita o multitudine de digiti binari! In plus este de asemenea dificil pentru oameni sa manipuleze asemenea numere fara sa faca greseli. De aceea cativa producatori de calculatoare/automate programabile au inceput sa implementeze sistemul de numeratie octal.
Acest sistem poate fi gandit ca baza 8 din moment ce consista din 8 digiti.
Folosind formula din nou, putem converti un numar octal intr-un numar zecimal destul de usor.
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de octale pentru referinta. Randul de sus arata puterile lui 8 pe cand randul de jos arata valoarea zecimala echivalenta.
Conversiile numerelor octale
87
86
85
84
83
82
81
80
2097152
262144
32768
4096
512
64
8
1
Sistemul octal este o cale convenabila pentru noi de a exprima sau scrie
numere binare in sistemele de automatele programabile. Un
numar binar cu un mare numar de digiti poate fi in mod convenabil scris intr-o
forma octala cu mai putini digiti. Aceasta pentru ca
un digit octal reprezinta de fapt 3 digiti binari.
Tabelul urmator arata ceea ce doream sa spunem:
Numar binar cu echivalentul sau octal
1
1
1
0
0
1
0
0
1
1
1
0
0
1
0
1
1
6
2
3
4
5
Hexazecimalul este cea mai buna metoda de gandire.
Hexazecimal- Sistemul de numeratie binar cere o multitudine de digiti pentru a reprezenta un numar mare. Sistemul octal aduce imbunatatiri. Sistemul hexazecimal este insa cea mai buna solutie, pentru ca ne permite sa folosim si mai putini digiti.
De aceea este cel mai popular sistem de numeratie utilizat in calculatoare si in automatele programabile. Sistemul hexazecimal mai este cunoscut ca baza 16 sau simplu hex. Cum spune si numele, are 16 digiti. Digitii sunt: 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F.
Folosind formula din nou, putem converti un numar hexa in zecimal destul deusor.
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de hexazecimale pentru referinta. Randul de sus arata puterile lui 16 pe cand randul de jos arata valoarea zecimala echivalenta.
Conversiile numerelor hexa
168
167
166
165
164
163
162
161
160
4294967296
268435456
16777216
1048576
65536
4096
256
16
1
In final, sistemul hexa este poate cea mai convenabila cale pentru noi sa exprimam sau sa scriem numerele binare in sistemele de automate programabile. Un numar binar cu un mare numar de digiti poate fi scris convenabil in forma hexa cu mai putini digiti decat in forma
Tabelul urmator arata ceea ce doream sa spunem:
Numar binar cu echivalentul sau Hexa
0
1
1
1
0
1
0
0
1
0
1
0
0
1
0
1
7
4
A
5
Din tabel putem vedea ca numarul binar 0111010010100101 este 74A5 in hexa (29861 in zecimal). Cum putem vedea, cand ne gandim la registre, este mai usor sa gandim in hexa decat in binar sau in octal.
6 Automate programabile TSX 07
6.1 Prezentare automate programabile
Automatele TSX 37-08 au 2 module de intrare/ iesire a cate 28 de pini fiecare (16 intrari si 12 iesiri) localizate in primele doua sloturi si avand doua jumatati de slot diponibile.
Prezinta doar o singura configuratie pentru alimentare si curent alternativ si nu administreaza intrarile/iesirile la distanta pe un nano-PLC sau pe bus-ul AS-I
Sloturile disponibile pot fi echipate cu module de format standard (fig 3) sau cu doua jumjati de module (fig 4).
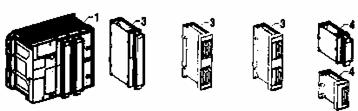
6.2 Descrierea automatelor programabile
Cuprinde urmatoarele elemente :
1. Trei sloturi in care sunt incorporate alimentarea, procesorul si memoria.
2. Blocul de vizualizare centralizat.
3. Portul terminal TER.
4. Butonul de RESET.
5. Trapa de acces la bornele de alimentare.
6. Trapa de acces la bateria optionala si la comutatorul de protectie si scriere a sistemului de operare.
7. 28 module I/O pozitionate in primele doua sloturi.
Caracteristici :
tensiunea de alimentare : 110V.240V in c.a. Si 24V in c.c.
modulele de I/O : I - 24V in c.c. si 115V in c.a.
O - 24V in c.c.
Sintaxa pentru modulele de I/Q este urmatoarea :
'%' - simbol ;
I or Q - intrare sau iesire ;
Pozitia x=1 la 6 ;
'i' - canal .
Canale de adresare pentru TSX 37-08 :
Formatul standard pentru modulul cu 28 I/Q :
-numarul canalului : vechea pozitie 0 la 15 ;
noua pozitie o la 11 ;
-adresa canalului : vechea pozitie %Ix.0 la Ix.15 ;
noua pozitie %Q(x+1).0 la Q(x+1).11.
Regim de lucru :
temperatura de functionare : 0..+60°C (fara unitate de ventilatie) ;
umiditatea relativa : 10..95% (fara condensare)
inaltime : 0.2000m ;
temperatura de stocare : -25+70°C :
Alimentarea la reteaua electrica :
Q - izolator general ;
Fu1 - siguranta de 1A ;
KM - contactor ;
Fu2 - siguranta de 0.5A, standard.