|
|
|
|
PROIECTAREA SISTEMULUI DE SUSPENSIE
Suspensia de automobile :
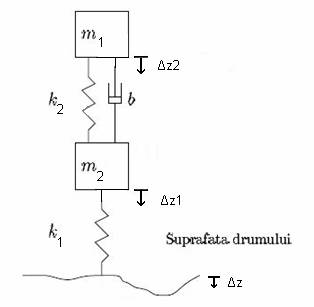
Figura urmatoare reprezinta schematic modelul simplificat al unei roti de automobil. Coordonatele corpurilor m1 si m2 notate cu x1 si respectiv x2 reprezinta deplasarile celor doua corpuri de la pozitiile lor de echilibru.
m1 - masa ce revine unei roti din masa totala a automobilului
k1 - este constanta de elasticitate a pneului.
b - constanta de frecare vascoasa in interiorul amortizorului.
m2 - este masa rotii.
k2 - este constanta de elasticitate a arcului.
Schema este echivalent cu:
function dxdt=susp(t,x)
u=0.01; m2=50; m1=1500; k1=2000; k2=10000;b=70;
dxdt=[-k1*x(2)+k1*u;m1*x(1)-b*m1*x(2)-m1*x(3)+b*m1*x(4);
k2*x(2)-k2*x(4);b*m2*x(2)+m2*x(3)-b*m2*x(4)]
Pentru
[t,y]=ode23('susp',[0,1],[1,0,0,0]);
Plot(t,y); grid;
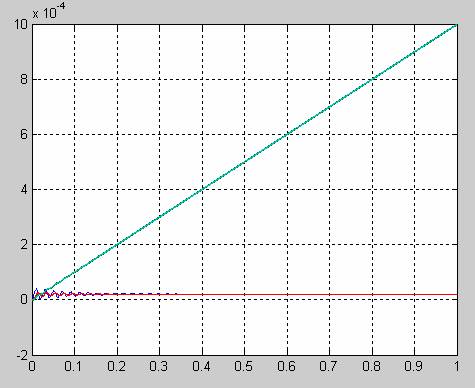
Graphic este:
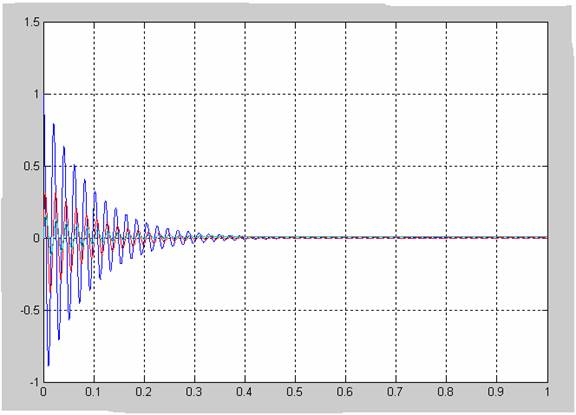
De pe figura de mai jos se vede ca dupa 0.5 secunde se stabilizeaza semnalul verde, dupa 0.6 secunde se stabilizeaza semnalul rosu si dupa 0.55 se stabilizeaza si semnalul albastru.
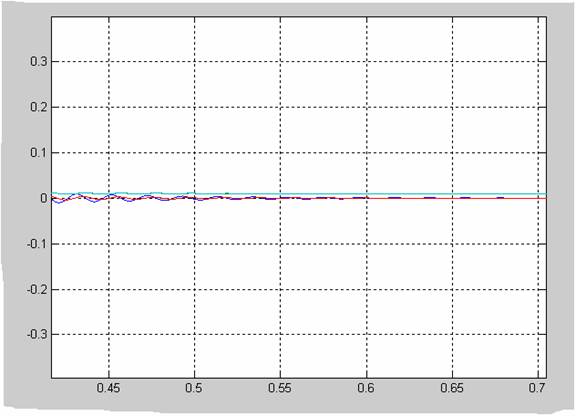
Pentru un semnal aleator u=0.1*sin(0.1*t) grapic este :