|
|
|
|
Miniroboti - Proiectarea componentelor robotului cu deplasare prin balansarea bratelor (de tip maimuta)
1.1. Studiu preliminar
Date de proiectare
In cele ce urmeaza, se definesc caracteristicile robotului.
Acesta trebuie sa fie apt sa parcurga un cablu, asemanator deplasarii unei maimute de-a lungul unei corzi orizontale. Acest tip de miscare permite sa fie depasite numeroase obstacole, spre deosebire de deplasarea de tip senila (omida).
Se stabilesc urmatoarele premise:
cablul pe care se deplaseaza minirobotul are sectiune circulara si este rectiliniu in plan orizontal;
diametrul cablului este de 15 mm;
robotul se va deplasa in lungul cablului cu o viteza de 20 mm/s;
bratele robotului au dimensiunile 200 x 40 x 20 mm;
motoarele alese sunt de tip Maxon Motors.
Fie obstacolul urmator, in sistemul de coordonate (O, x, y, z):
Fig 1.1.1.
xo, yo, zo - dimensiunile obstacolului;
l - lungimea bratului;
d - distanta dintre extremitatea libera a bratului si cablu;
e - distanta dintre cele doua brate;
h - distanta dintre articulatie si extremitate.
![]() (1)
(1)
Sunt acele obstacole cu dimensiuni mari pe verticala, orientate in jos (putin intalnit, dar posibil):
Fig 1.1.3.
"ε" provine din faptul ca bratul robotului are o grosime ce nu este neglijabila si trebuie sa se tina cont de dimensiunea, zo.
![]() (2)
(2)
Sunt obstacole cu dimensiune mare pe directia cablului (zo). Robotul poate atinge o pozitie cu cele doua brate orizontale. Distanta dintre graifare va fi atunci 2(l-h):
Fig 1.1.4.
Faptul ca bratele sunt amplasate de o parte si cealalta a motorului central, definind spatiul dintre planele de rotatie a bratelor, permite sa fie depasite mai multe probleme. Dintre obstacolele ce pot fi depasite fac parte cele care sunt automat depasite, fara sa se fi efectuat vreo comanda.
Fig 1.1.5. - obstacol vertical, orientat in sus, iar pozitia obstacolului diferita de pozitia viitoare a graifarelor;
Fig 1.1.6. - obstacol in "spatiul triunghiular";
Fig 1.1.7. - obstacol in afara spatiului triunghiular, dar depasit cand dimensiunea si pozitia sunt favorabile;
Fig 1.1.8. - obstacol de mari dimensiuni, perpendicular pe directia cablului (pozitia obstacolului este diferita de pozitia viitoare a graifarelor).
Obstacole depasite prin actionarea motoarelor (numai pentru obstacole de mici dimensiuni pe z):
Fig 1.1.9. - se poate produce impactul cu motorul central, dar este depasit daca dimensiunea este moderata (medie);
Fig 1.1.10. - se poate produce impactul cu graifarele, dar este depasit daca dimensiunea este mica.
Se presupune ca robotul se deplaseaza in lungul cablului conform fazelor urmatoare:
-deschiderea graifarelor posterioare (comandate de motorul din spate), cu scopul de a elibera bratul corespunzator si de a-i permite acestuia sa se miste.;
-rotatia celor doua brate (cu comanda motoarelor anterior, din fata si central), astfel incat bratul posterior atinge cablul, devenind in acest fel brat anterior. Unghiul α dintre brat si cablu se va lua egal cu 45o (un unghi α mai mic permite robotului sa se deplaseze mai repede, dar pot sa apara probleme in cazul unor eventuale obstacole);
-inchiderea graifarelor pentru a prinde cablul si a permite urmatoarea miscare (detaliul acestei faze va fi explicat la prezentarea captorilor).
Cel mai simplu ar fi ca la T (timp) = 1 sa se roteasca motorul central cu unghiul dorit, apoi la T = 2, motorul fixat pe capatul bratului posterior. Totusi, vom incerca sa le actionam simultan, astfel incat cele doua brate sa ajunga in pozitie verticala in acelasi timp:
Fig 1.1.11.
Observatii/avantaje: a)miscarea se aseamana mai mult cu aceea a unei maimute; b)se reduce cuplul (solicitarea) de la motorul anterior, din fata; c) creste viteza totala datorita actionarii simultane.
Fig 1.1.12.
Mai mult, cu scopul de a asigura o buna receptie, modulul asociat graifarelor va trebui sa ramana vertical pe tot parcursul miscarii, de unde necesitatea de a actiona motorul posterior, din spate, in acelasi timp (fig. 1.1.12). Aceste faze ale miscarii trebuie urmate, dupa cum s-a aratat, in cazul unui traseu fara obstacole. Se analizeaza in continuare cazul traseului cu obstacole.
Detalierea miscarii cu obstacol
Asa cum s-a aratat, anumite obstacole nu pot fi depasite. Robotul va trebui sa le descopere si sa se opreasca (cu ajutorul captorilor).
Din categoria obstacolelor ce pot fi depasite fac parte acelea care nu sunt evitate in mod sistematic.
Se detaliaza miscarea conform fazelor urmatoare:
- Impactul cu motorul central
Fig 1.1.13.
In acest caz, se redefinesc unghiurile cu care se rotesc motoarele si se reia deplasarea incepand cu unghiurile initiale.
Fig 1.1.14.
- Impactul cu modulul graifarelor
Fig 1.1.15.
Se apropie obiectul la o distanta ce se va defini si se reia demersul asociat unei miscari fara obstacol, schimband totusi unghiurile realizate de motoare,
Fig 1.1.16.
Se determina daca unghiurile initiale sunt convenabile. Daca da, se continua deplasarea cu aceste unghiuri. Daca nu, se aleg astfel incat motorul central sa se situeze pe aceeasi verticala cu obiectul (dedesubt de acesta) si apoi se reia deplasarea de baza (initiala)
Fig 1.1.17.
Motorul anterior, din fata, trebuie deci sa se roteasca cu un unghi (in valoare absoluta):
![]() (3), cu
:
(3), cu
: ![]() (4),
(4),
yo: inaltimea obstacolului,
d: distanta dintre graifarele din fata si obiect.
De asemenea, motorul central se roteste cu un unghi (in valoare absoluta):
![]() (5), cu
:
(5), cu
: ![]() (6).
(6).
Rezulta:
![]() (7).
(7).
In continuare, se detaliaza procedurile executate la contactul cu un obstacol, atat cele ce nu pot fi depasite (opresc robotul), cat si celelalte, care pot fi depasite (actioneaza asupra motoarelor daca este nevoie).
1.2. Conceptia mecanica in Solid Works
Detalii de piese:
1. Modulul graifarelor (carcasa), 2 bucati,
 Fig 1.2.1.
Fig 1.2.1.
2. Graifar, 4 bucati
 Fig 1.2.2.
Fig 1.2.2.
3. Bratul 1, 1 bucata
 Fig
1.2.3.
Fig
1.2.3.
4. Bratul 2, 1 bucata
 Fig 1.2.4.
Fig 1.2.4.
5. Suportul motorului central, 1 bucata,
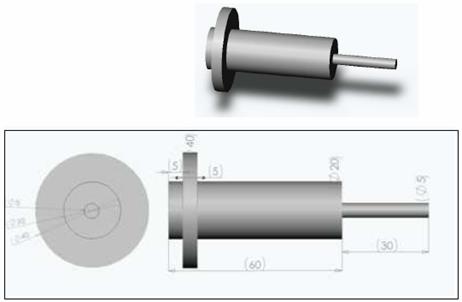 Fig 1.2.5.
Fig 1.2.5.
1. Brat/ Modulul graifarelor,
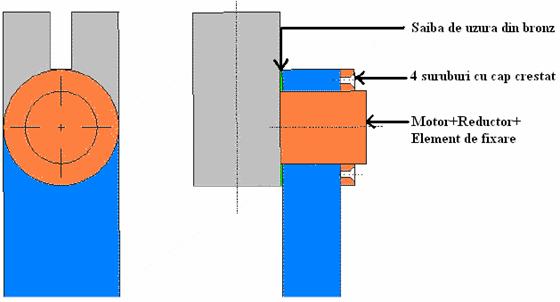
Fig 1.2.6.
2. Graifar/ Modulul graifarelor,
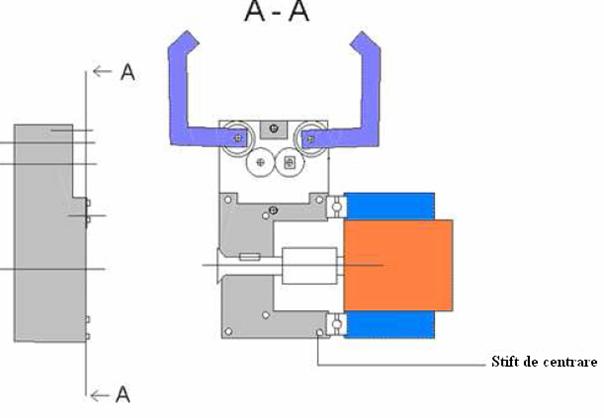
Fig 1.2.7. - stift de centrare
3. Bratul 1 si 2/ Suportul motorului central,
Fig 1.2.8.
Se identifica eforturile la care trebuie sa reziste elementele componente ale robotului.
- Graifare
 Fig. 1.2.9.
Fig. 1.2.9.
Compresiune : ![]() (8),
(8),
Incovoiere : ![]() (9);
(9);
- Suruburi
Fig. 1.2.10.
Forfecare : ![]() (10);
(10);
- Brat

Fig 1.2.11.
Tipurile de solicitari la care este supus un brat sunt urmatoarele:
intindere,
rasucire (datorita greutatii celuilalt brat in momentul balansarii),
incovoiere (cuplul motor / graifare inchise).
Calculul acestor solicitari poate fi interesant pentru optimizarea constructiei si reducerea costurilor de fabricatie.
Vizualizarea robotului
Piesele componente au fost realizate in Solid Works si apoi asamblate. Rezultatul final este urmatorul:
Fig 1.2.12.
1.3. Alegerea motoarelor
1.3.1. Aspecte generale
Calculul momentelor necesare
1. Motorul din capatul bratului
Fig 1.3.1.
Se noteaza cu:
Par - greutatea motorului posterior, din spate;
Pc - greutatea motorului central;
Pb - greutatea unui brat;
l - lungimea unui brat.
Momentul din A este egal cu suma greutatilor multiplicate cu bratele de parghie respective. El este maxim pentru o pozitie orizontala (care in practica nu este atinsa niciodata):
Fig 1.3.2.
![]() (11)
(11)
![]() (12)
(12)
2. Motorul central
Fig 1.3.3.
Momentul din A este maxim cand bratul posterior, din spate, este orizontal (in opozitie).
![]() (13)
(13)
![]() (14).
(14).
3. Motorul pentru actionarea graifarelor
Fig 1.3.4.
Momentul maxim este in pozitia deschisa.
![]() (15)
(15)
![]() (16).
(16).
1.3.2.Calculul vitezelor de rotatie necesare
Caietul de sarcini prevede o viteza de deplasare rectilinie egala cu 30 mm/s. In consecinta, pentru a efectua o miscare (deschiderea graifarelor posterioare, din spate, rotatia bratelor, inchiderea din nou a graifarelor), robotul trebuie sa realizeze timpul urmator :
Fig 1.3.5.
![]() (17)
(17)
Daca se considera ca robotul, in acelasi timp, se desprinde si ajunge intr-o pozitie verticala (pentru cele doua brate) si apoi se redreseaza si se prinde din nou de cablu, atunci acest timp va fi:
![]() (18)
(18)
tv: timpul efectuat pentru a atinge o pozitie verticala.
1. Motorul anterior, din fata
Fig 1.3.6.
Trebuie sa se roteasca cu unghiul π/2 - α intr-un timp tv - tdesch. graifare (ouv) (deschiderea graifarelor se efectueaza inaintea miscarii bratelor), de unde:
![]() (in
radiani) (19)
(in
radiani) (19)
 (20)
(20)
Ωav > 0, daca bratul anterior, din fata = bratul 1
Ωav < 0, daca bratul anterior, din fata = bratul 2
A se vedea conventiile stabilite pentru sensul pozitiv de rotatie al unui motor si pozitia anterioara.
2. Motorul central
Fig 1.3.7.
Trebuie sa se roteasca cu unghiul 2α intr-un timp tv - tdesch. graifare (ouv) (deschiderea graifarelor se efectueaza inaintea miscarii bratelor), de unde:
![]() (in
radiani) (21)
(in
radiani) (21)
 (22)
(22)
Ωc > 0, daca bratul anterior, din fata = bratul 2
Ωc < 0, daca bratul anterior, din fata = bratul 1
A se vedea conventiile stabilite pentru sensul pozitiv de rotatie al unui motor si pozitia anterioara.
3. Motorul posterior, din spate
Fig 1.3.8.
Pentru a evita orice problema (lipsa cablului la sfarsitul miscarii), ne propunem sa mentinem modulul vertical. Pentru aceasta este avantajos sa punem in functiune motorul posterior, din spate.
Trebuie sa se roteasca cu unghiul π/2 + α intr-un timp tv - tdesch. graifare (ouv) (deschiderea graifarelor se efectueaza inaintea miscarii bratelor), de unde:
![]() (in
radiani) (23)
(in
radiani) (23)
 (24)
(24)
Ωar > 0, daca bratul anterior, din fata = bratul 2
Ωar < 0, daca bratul anterior, din fata = bratul 1
4. Motorul pentru graifare
Fig 1.3.9.
Trebuie sa se roteasca cu unghiul θ intr-un timp tdesch. graifare (ouv) (timp pentru deschiderea graifarelor), de unde:
 (25)
(25)
Ωcr > 0, daca graifarele se deschid
Ωcr < 0, daca graifarele se inchid.
Calculele au condus la urmatoarele rezultate:
Mot. din capatul bratelor
Mot. central
Mot. pt. graifare
Viteza de rotatie pt. deplasarea sarcinii (rot/min)
3,70
2,47
7,60
Cuplul pt. deplas. sarcinii (Nm)
2,68
0,72
0,003
Motoarele alese sunt de tip Maxon, cu urmatoarele caracteristici:
Pozitia motorului
Nr. buc.
Tipul reductorului
Cod
Central
Cap. brate
Modul graifare
1
2
2
Red. planetar GP22C
Red. planetar GP26B
Red. cu pinioane cu dinti drepti GS12A
144009
144063
313993
Tipul de motor
Cod
Greutate totala (g)
Putere (W)
A-max 22
RE25
A-max 12
110135
118743
265389
110
190
25
3,5
10
0,5
Tens. de alim. (V)
7,2
12
4,5