|
|
|
|
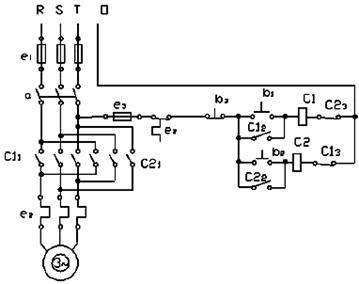
Inversarea sensului de rotatie al motorului asincron trifazat
|
Inversarea manuala Inversarea automata |
|||||||||||
Sensul de rotatie al motorului asincron este dat de sensul de rotatie al campului magnetic invartitor, care la randul sau este determinat de suc-cesiunea fazelor.
Pentru inversa-rea sensului de rotatie este deci suficient ca sa inver-sam intre ele doua faze. Acest lucru se poate realiza:
Manual, cu re-versoare de sens (stanga, figura de mai sus),
Automat, cu ajutorul contactoarelor, (dreapta figurii), in care caz se utilizeaza doua contactoare cate unul pentru fiecare sens de rotatie.
Prin apasarea butonului ![]() este alimentata
bobina
este alimentata
bobina ![]() ; ca urmare se deschide contactul
; ca urmare se deschide contactul ![]() (de interblocare) din
circuitul bobinei
(de interblocare) din
circuitul bobinei ![]() , iar apoi se inchid contactele
, iar apoi se inchid contactele ![]() , realizandu-se rotirea motorului in sensul direct. Se
inchide de asemenea contactul
, realizandu-se rotirea motorului in sensul direct. Se
inchide de asemenea contactul ![]() de automentinere a comenzii si dupa eliberarea
butonului
de automentinere a comenzii si dupa eliberarea
butonului ![]() .Apasarea butonului
.Apasarea butonului ![]() (de rotatie in sens invers) nu are nici un efect
datorita contactului
(de rotatie in sens invers) nu are nici un efect
datorita contactului ![]() care este deschis.
care este deschis.
Pentru inversarea sensului de
rotatie este necesara mai intai oprirea motorului prin apasarea
butonului![]() , astfel incat se intrerupe alimentarea bobinei C1 si se
inchide contactul
, astfel incat se intrerupe alimentarea bobinei C1 si se
inchide contactul ![]() .Prin aceasta, la apasarea butonului
.Prin aceasta, la apasarea butonului ![]() se asigura alimentarea bobinei contactorului
se asigura alimentarea bobinei contactorului ![]() care prin inchiderea
contactelor
care prin inchiderea
contactelor![]() realizeaza alimentarea motorului cu doua faze inversate.
Se inchide, de asemenea contactul
realizeaza alimentarea motorului cu doua faze inversate.
Se inchide, de asemenea contactul ![]() de automentinere a rotatiei in sens invers si
dupa eliberarea lui
de automentinere a rotatiei in sens invers si
dupa eliberarea lui ![]() , iar prin deschiderea contactului de interblocare
, iar prin deschiderea contactului de interblocare ![]() se elimina
efectul apasarii butonului
se elimina
efectul apasarii butonului ![]() .
.
Contactele auxiliare normal inchise ![]() si
si ![]() asigura interblocarea contactoarelor C1 si C2 pentru
evitarea comandarii simultane a acestora, fapt ce ar determina punerea in
scurt circuit a doua faze.
asigura interblocarea contactoarelor C1 si C2 pentru
evitarea comandarii simultane a acestora, fapt ce ar determina punerea in
scurt circuit a doua faze.
Reglarea turatiei motoarelor asincrone
Prin reglarea turatiei intelegem modificarea voita a acesteia, potrivit unei anumite cerinte de actionare. Reglarea se poate face manual sau automat, prin intermediul unui sistem de comanda.
Se cunoaste ca ![]() , de unde rezulta si posibilitatile de
reglare a turatiei:
, de unde rezulta si posibilitatile de
reglare a turatiei:
I. schimbarea numarului perechilor de poli, p;
II. variatia alunecarii s;
III. alimentarea cu frecventa variabila f;
IV. reglarea tensiunii de alimentare.
I. Reglarea turatiei prin schimbarea numarului perechilor de poli p
|
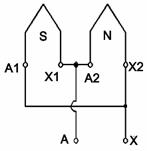
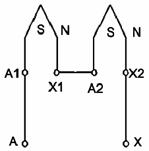
serie, in faza, p = 2 paralel, in opozitie p = 1 |
Este o metoda de reglare discreta a turatiei care se aplica la motoarele asincroane cu indusul de tip colivie. Nu se aplica motoarelor cu rotor bobinat deoarece simultan cu modificarea numarului de poli la stator trebuie sa se modifice corespunzator numarul perechilor de poli la rotor, ceea ce este complicat.
De obicei se realizeaza doua turatii ( 3000/1500, 1500/750, 1000/500), mai rar trei sau patru turatii.
Se cunosc doua modalitati:
1. Utilizarea unei infasurari statorice speciale si:
a) modificarea conexiunilor infasurarii (Dahlander)
b) modulatia amplitudinii pe pol.
2. Utilizarea a doua infasurari statorice pe faza:
a) o infasurare speciala Dahlander plus o infasurare obisnuita, obtinandu-se 3 turatii (3000/1500+1000).
b) doua infasurari speciale Dahlander, rezultand 4 viteze (3000 / 1500 + 1000 / 500).
Comutarea infasurarilor se poate realiza manual (cu comutatoare) sau automat, utilizand scheme de comanda corespunzatoare.
Metoda 1.a: Presupune utilizarea unei infasurari speciale Dahlander cu doua com-ponente care se pot lega:
- in serie si in faza, obtinandu-se un numar de poli p = 2;
- in paralel si in opozitie, rezultand p = 1.
Schimbarea turatiei se face la putere
aproximativ constanta![]() .
.
|
|
|
Exemple de legare si comutare a infasurarilor; caracteristicile mecanice |
II. Reglarea turatiei prin modificarea alunecarii s
Metoda se aplica motoarelor cu indus bobinat si se
realizeaza prin reglarea rezistentei circuitului indusului,
obtinandu-se reglarea continua a turatiei intr-un domeniu de 15
- 20 % din turatia nominala ![]() (vezi figura).
(vezi figura).
Reglarea are loc la cuplu constant.
Dezavantajele reglajului sunt:
- neeconomic, deoarece cu cresterea rezistentei circuitului
indusului ![]() , cresc pierderile prin efect Joule - Lenz,
, cresc pierderile prin efect Joule - Lenz,
- este instabil la incarcari mici,
- reglarea se poate realiza numai pentru turatii ![]() ,
,
- reostatele de reglare sunt voluminoase.
Metoda se aplica la motoare de putere mica.
III. Reglarea turatiei prin alimentarea cu frecventa variabila (marita)
Metoda se aplica pentru realizarea unor turatii foarte mari, care prin transformare mecanica de multiplicare a turatiei, nu ar putea fi realizate (apar vibratii, zgomote si uzuri mari).
De exemplu, la rectificarea interioara, pentru diametrul sculei ![]() si viteza
si viteza ![]() , este necesara turatia:
, este necesara turatia:
![]()
Pentru turatii ![]() se pot folosi transmisii cu curele late din materiale
speciale.
se pot folosi transmisii cu curele late din materiale
speciale.
Pentru: ![]() se pot folosi turbine pneumatice sau motoare asincrone de
frecventa marita.
se pot folosi turbine pneumatice sau motoare asincrone de
frecventa marita.
La aceste motoare de turatie marita, pentru realizarea unui moment de inertie redus, indusul are diametru mic si lungime mare, sau se utilizeaza un rotor disc. Partea mecanica trebuie realizata in conditii speciale:
- echilibrare dinamica;
- lagare de rostogolire cu rulmenti preselectionati si montati cu prestrangere;
- lagare cu sustentatie aerodinamica;
- lagare cu sustentatie hidrostatica.
Pentru realizarea turatiei de mai sus este necesara alimentarea motorului la frecventa :
![]()
Aceste frecvente marite pot fi realizate cu generatoare de frecventa care pot fi:
- convertizoare de frecventa - care sunt generatoare
rotative formate dintr-un motor asincron de 3000 ![]() care antreneaza
un generator de frecventa marita.
care antreneaza
un generator de frecventa marita.
Generatoarele rotative au urmatoarele caracteristici:
- randament ridicat;
- siguranta in functionare;
- gabarite mari;
- frecventa fixa (300 - 2400 Hz).
Se utilizeaza pentru puteri mari.
- generatoare electronice (statice), care au urmatoarele caracteristici:
- randament redus;
- costuri mari;
- frecventa reglabila continuu intr-un interval larg.
Se utilizeaza la puteri mici, mijlocii.
IV. Reglarea turatiei prin reglarea tensiunii de alimentare
Metoda se utilizeaza mai putin, deoarece odata cu reducerea tensiunii de alimentare scade si momentul motor M. Ea se poate aplica prin:
|
|
- utilizarea unui autotransformator;
- cu amplificatoare magnetice;
- folosind convertizoare de curent
alternativ cu tiristori.
In figura este prezentata schema bloc a unui sistem de reglare care utilizeaza un convertizor de curent alternativ cu tiristori. Sistemul se compune din urmatoarele blocuri:
- DR - dispozitiv de reglare a tensiunii cu tiristoare comandate
- DCT - blocul de comanda a tiristoarelor
- DPR - dispozitiv de programare a valorii de referinta
- TG - tahogenerator
Reglarea tensiunii se realizeaza de la potentiometrul P, iar stabilizarea turatiei se obtine cu ajutorul tahogeneratorului TG si a dispozitivului de reglare DPR.
4.5.Oprirea si franarea motoarelor electrice asincrone trifazate
Oprirea se poate face in doua moduri:
- inertial, prin consumarea energiei cinetice reziduale, prin frecarile proprii din sistem, rezultand un timp de oprire mare;
- cu franare fortata, obtinandu-se un timp de oprire redus si o crestere a preciziei de oprire la cota.
Franarea fortata poate fi:
- exterioara - cu frana mecanica;
- interioara - electrica prin motor.
Franarea prin motor se poate face in trei moduri:
- prin contraconectare;
- prin metoda de franare dinamica;
- prin metoda de franare recuperativa.
|
|
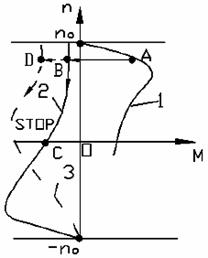
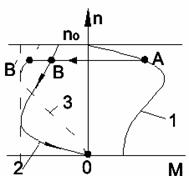
Franarea prin contraconectare (caracteristicile mecanice se pot vedea in figura alaturata).
Aceasta se realizeaza prin inversarea pentru un timp scurt, a oricaror doua faze de alimentare, urmata de deconectarea completa a motorului de la retea. Prin inversarea sensului de rotatie a campului magnetic infasurator se dezvolta un cuplu foarte mare de franare care reduce rapid turatia. Punctul de functionare se deplaseaza din A in B si coboara pana in punctul C. Daca in C motorul nu este deconectat, incepe rotirea in sens invers.
La aplicarea acestei metode apar solicitari dinamice deosebit de mari.
Daca franarea se realizeaza pe caracteristica artificiala 3 se obtine un efect de franare si mai pronuntat, dar metoda este mai complicata si se poate aplica numai la motoarele cu indusul bobinat.
Franarea dinamica
Franarea dinamica sau in regim de generator nerecuperativ, consta in deconectarea statorului de la retea si conectarea infasuratorilor statorului ( 2 inseriate la conexiune stea) la o sursa de curent continuu. Motorul se transforma intr-un generator sincron cu campul magnetic al statorului (inductor) fix in timp si variabil in spatiu, iar indusul ca indus.
|
|
Energia electrica produsa este consumata (transformata in caldura) pe rezistenta circuitului rotoric.
Punctul de functionare se deplaseaza din A in B, coborand apoi pe caracteristica 2 pana in punctul O, in care turatia este zero.
Cuplul de franare este dat de relatia:
![]()
in care :![]() este fluxul de excitatie, iar
este fluxul de excitatie, iar ![]() - curentul rotoric.
- curentul rotoric.
Franarea are loc ca urmare a trecerii de pe caracteristica 1 pe caracteristica
2. La turatii mari, ![]() este redus si
cand turatia tinde spre zero,
este redus si
cand turatia tinde spre zero, ![]() tinde spre zero, ceea
ce nu corespunde cel mai bine cerintelor de franare. De aceea, pentru
motoarele cu indus bobinat se poate lucra pe caracteristica artificiala 3
obtinuta prin introducerea unor rezistente suplimentare de
franare in circuitul rotoric.
tinde spre zero, ceea
ce nu corespunde cel mai bine cerintelor de franare. De aceea, pentru
motoarele cu indus bobinat se poate lucra pe caracteristica artificiala 3
obtinuta prin introducerea unor rezistente suplimentare de
franare in circuitul rotoric.
Se poate proceda si combinat, pe caracteristicile 3 si 2.
Reglarea ![]() se poate face si
prin reglarea curentului de excitatie
se poate face si
prin reglarea curentului de excitatie ![]() .
.
|
|
Principiul metodei de franare dinamica, desi aparent complicat, este in mod curent utilizat ca urmare a unor avantaje, in mod deosebit de natura dinamica.
In schema din figura s-a notat:
T - transformator;
R - redresor;
C1 - contactor de pornire - oprire;
C2 - contactor de franare;
d - releu de timp cu temporizare la
alimentare;
b1 - buton de pornire;
b2 - buton de oprire naturala
(inertiala);
b3 - buton de oprire cu franare
fortata.
Montajul functioneaza dupa cum urmeaza.
La apasarea butonului b1 este alimentata bobina contactorului C1 care isi inchide contactele principale C11 asigurand pornirea motorului. Se inchide de asemenea contactul C12 de automentinere a comenzii de pornire si contactul C13 de pregatire a fazei de franare.
La apasarea butonului de franare b3 este alimentata bobina releului d care isi inchide imediat contactul d asigurand alimentarea bobinei contactorului C2. Prin deschiderea contactului C22 se intrerupe alimentarea bobinei C1 motorul fiind decuplat de la retea si se deschide de asemenea contactul C13 intrerupand alimentarea bobinei d. Prin inchiderea contactelor C21 tensiunea continua redresata de redresorul R este aplicata pe doua faze ale motorului, incepand procesul de franare. Dupa scurgerea timpului de temporizare, contactul d se deschide intrerupand alimentarea bobinei C2, terminandu-se faza de franare.
Daca timpul de temporizare este mai mare decat timpul de oprire a miscarii se obtine franarea totala a motorului.