|
|
|
|
ECHIPAMENTE ELECTRONICE DE AUTOMATIZARE
1. ELEMENTE DE TEORIA SISTEMELOR DE REGLARE AUTOMATA
1.1 Generalitati
Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului in aceste procese, asigurandu-se desfasurarea lor in conformitate cu anumite cerinte impuse, fara interventia operatorului.
Principalele avantaje ale automatizarii constau in:
cresterea productivitatii muncii;
imbunatatirea calitatii muncii;
reducerea efortului intelectual depus de oameni in cadrul procesului de productie.
In structura oricarei instalatii automatiyate se disting:
instalatia tehnologica;
dispozitivul de automatizareS
Instalatia tehnologica cuprinde ansamblul utilajelor in care se desfasoara procesul tehnologic iar dispozitivul de automatizare reprezinta totalitatea elementelor care asigura automatizarea instalatiei tehnologice. Instalatia tehnologica impreuna cu dispozitivul de automatizare formeaza sistemul automat.
Cele mai simple sisteme automate sunt sistemele de comanda automata; un asemenea sistem este reprezentat in figura 1.1, unde:
S1 (IT) reprezinta instalatia tehnologica:
S2 - dispozitivul de automatizare.
Semnalele (curenti sau tensiuni) care apar la iesirile sau intrarile blocuriilor din sistem sunt:
u - marimea de comanda;
m - marimea de executie;
y - marimea de iesire.
Modificarea dupa dorinta a marimii de iesire y se obtine prin modificarea marimii de comanda u fara interventia directa a operatorului uman asupra instalatiei tehnologice.
De exemplu, in cazul instalatiei de comanda a turatiei unui motor electric de current continuu din figura 1.2,

Fig 1.1 sistem de comanda automata
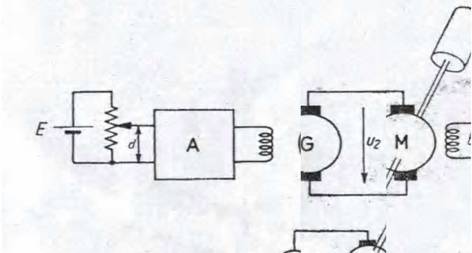
Fig. 1.2 Sistem de comanda a turatiei unui motor de curent continuu.
marimea de comanda este deplasarea d a cursorului fata de capatul inferior al potentiometrului, marimea de executie este tensiunea U2 aplicata motorului iar marimea de iesire poate fi considerata turatia motorului M sau tensiunea data de tahogeneratorul TG si proportionala cu aceasta turatie. Instalatia tehnologica o constituie motorul iar dispozitivul de automatizare este format din amplificatorul A si generatorul G. Turatia motorului este marita sau micsorata dupa cum cursorul potentiometrului este deplasat in sus sau in jos. Exista, asadar, o lege de dependenta y=f(u)
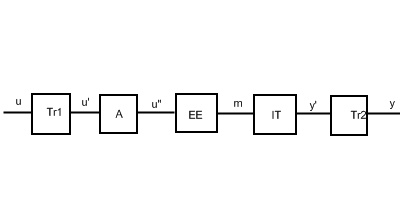
Fig. 1.3 Reprezentarea echivalenta a sistemului de comanda din fig 1.2
O alta reprezentare mai detaliata a instalatiei de comanda din figura 1.2 este data in figura 1.3, unde Tr1 si Tr2 poarta numele de traductoare. Traductoarele convertesc o marime neelectrica oarecare (deplasare, presiune, temperatura e.t.c. ) intr-o marime electrica (tensiune, current, rezistenta e.t.c.). In cazul de fata, s-a notat cu Tr1, potentiometrul care transforma deplasarea cursorului in tensiunea de intrare a amplificatorului A si cu Tr2 tahogeneratorul care converteste turatia motorului in tensiune continua. S-a notat prin EE (element de executie) generatorul de tensiune continua G.
Reprezentarea tipizata din figura 1.3, poate fi folosita pentru majoritatea sistemelor de comanda automata, semnificatia elementelor componente fiind, desigur, diferita de la caz la caz.
In realitate, legea de dependenta a marimii de iesire in functie
de marimea de intrare, y=f(u), poate fi afectata de diferite marimi perturbatoare. In cazul sistemului din figura 1.2, de plida, sarcina mecanica poate varia, tensiunea de alimentare a potentiometrului se poate modifica. Efectul acestor marimi perturbatoare, notate cu P1 si P2 in figura 1.1, nu poate fi corectat de catre un sistem de comanda si se impune, de aceea, efectuarea unei comparatii intre marimea de intrare si marimea de iesire. Sistemul din figura 1.1 devine astfel cel din figura 1.4 in care, pe langa marimile si blocurile diferite anterior mai intervin:
EC - elemental de comparatie;
r - marimea de referinta;
e - abaterea.
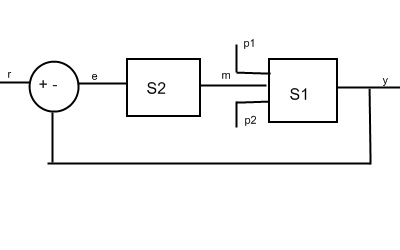
Fig 1.4 Sistem de reglare automata
In elementul de comparatie se calculeaza diferenta (abaterea e) intre marimea de referinta r si marimea de iesire y (e=r-y), iar intregul sistem automat actioneaza astfel incat sa micsoreze cat mai mult abaterea e. Legatura de la iesire la elemntul de comparatie se numeste legatura de reactie si, atunci cand y este o marime electrica, aceasta legatura este pur si simplu un conductor.
Atunci cand marimea de iesire se scade din marimea de referinta, reactia se numeste negativa. Daca elementul de comparatie s-ar fi obtinut nu diferenta ci suma dintre marimile y si r, reactia s-ar fi numit pozitiva. In sistemele automate reactia este totdeauna negativa.
Sistemul din figura 1.4 se numeste sistem de reglare automata si o prezentare mai detaliata a lui este data in figura 1.5 unde:
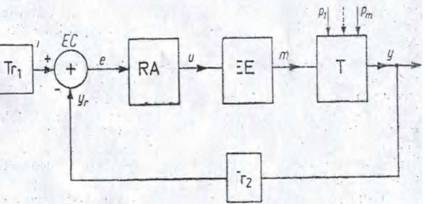
Fig 1.5 Schema bloc a unui sistem de reglare automata
Tr1 este traductorul de intrare mecesar in situatiile in care marimea de referinta nu este o marime electrica; el converteste r1 (marimea de referinta neelectrica);
EC - elementul de comparatie;
RA - regulatorul automat, asigura o anumita dependenta u=f(e) aleasa astfel incat variatia in timp a marimii de iesire y sa fie cat mai aproape de cea dorita;
EE - elementul de executie;
Tr2 - traducatorul de iesire transforma marimea de iesire y, in cazul general de natura neelectrica, in yr, marimea de reactie.
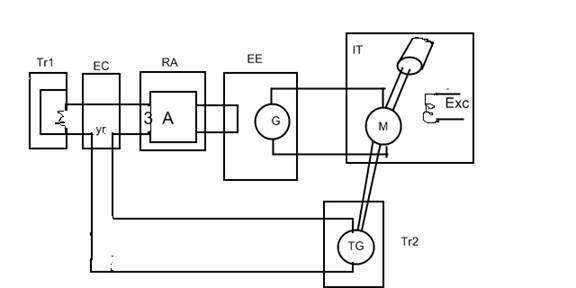
Fig. 1.6 Sistem de reglaj automat al turatiei unui motor de curent continuu.
Sistemul de comanda a turatiei unui motor de c.c. din figura 1.2 poate fi convertit in sistemul de reglare a turatiei unui motor de c.c. din figura 1.6 prin scaderea tensiunii tahogeneratorului din tensiunea de la iesirea potentiometrului. Acest circuit de scadere a tensiunilor constituie chiar elementul de comparatie. Corespondenta dintre celelalte elemente ale acestui exemplu particular si elementele schemei generale din figura 1.5 pot fi urmarite pe desen.
Principalul avantaj al sistemelor de reglare fata de sistemele de comanda automata constata in faptul ca influenta perturbatiilor asupra marimii de iesire y este mult redusa. Astfel sa preupunem ca din cauza unor perturbatii, turasia motorului creste peste valoare dorita. Tensiunea data de tahogenerator creste creste iar diferenta dintre tensiunea data de potentiometru si tensiunea data de tahogenerator va scade; in consecinta, tensiunea de la iesirea amplificatorului se va micsora determinand micsorarea tensiunii de alimentare a motorului si, in final, a turatiei lui.
O alta reprezentare a unui sistem de reglare automata (SRA) este data in figura 1.7, a. Ea se refera la un caz mai general, continand pe calea de reactie nu un simplu traductor, ci un regulator automat suplimentar, RA Pe calea directa, elementele componente sunt grupate intr-un mod diferit. Instalatia tehnologica impreuna cu elementul de executie si traductorul de iesire alcatuiesc partea fixa F a sistemului, denumita astfel deoarece ea este impusa din start inginerului proiectant.
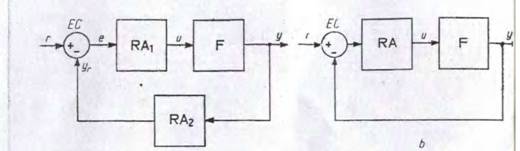
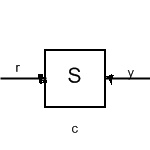
Fig. 1.7 Reprezentari echivalente ale sistemelor de reglare automata
In cadrul teoriei sistemelor de reglare automata se demonstreaza ca oricare asemenea sistem poate fi echivalent cu sistemul din figura 1.7, b, avand un singur regulator automat.
In figura 1.7, c este data reprezentare globala a tutror sistemelor din figurile anterioare, caracterizate prin aceea ca au o singura marime de intrare si o singura marime de iesire.
In concluzie, sistemele de reglare automata (SRA) - a caror reprezentare generala este data in figura 1.8 - asigura o anumita variatie in timp a uneia sau a mai multor marimi de iesire y1..ym ale instalatiei tehnologice in functie de evolutia in timp a uneia sau a mai multor marimi de intrare r1rm. Ele sunt descrise cu ajutorul unei scheme de elemente (schema functionala sau schema unui bloc). Elementul unui sistem automat (elementul de automatizare) este o parte componenta a unui sistem automat care indeplineste o functie de sine statatoare.
1.2 Clasificarea sistemelor de reglare automata
Sistemele automate pot fi clasificate dupa urmatoare criterii:
1. Dupa numarul marimilor de comanda si al parametrilor reglati se distingS
- SRA monovariabile (cu o singura intrare si o singura iesire) -vezi figura 8.7, c;
Dupa modul de variatie in timp a marimii (sau marimilor) de referinta exista:
- sisteme de stabilizare la care r este constant;
- sisteme cu program la care r variaza dupa un program prestabilit;
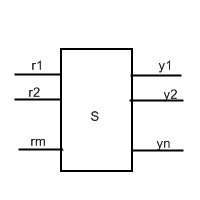
Fig 1.8 Sistem de reglare automata cu mai multe intrari si mai multe iesiri
- sisteme de urmarire la care marimea r variaza arbitrar.
3. Dupa dependenta legii de variatie y=f(r) de valoarea marimilor electrice din sistem SRA sunt:
- liniare,
- neliniare.
In cazul primelor, legea de variatie y=f(r) este independenta de valoare marimilor r, e, u, y iar in cazul celor neliniare, aceasta lege se modifica o data cu cresterea marimilor mentionate.
4. Dupa modul de variatie in timp a marimilor electrice principale sistemele de reglaj automat se impart in:
- SRA continue;
- SRA discrete.
In cazul SRA continue, marimile electrice care se transmit de la un bloc la altul sunt diferite de zero pe toata axa timpului in vreme ce in sisteme discrete ele iau valori diferite de zero doar pentru anumite valori ale timpului.
5. Dupa viteza de variatie a marimilor electrice din interiorul SRA si, in special, dupa viteza de variatie a semnalelor din interiorul instalatiei tehnologice se disting:
- SRA pentru procese lente;
- SRA pentru procese rapide.
6. Dupa gradul de adaptare a sistemelor la parametrii instalatiei tehnologice, exista:
- SRA cu acordare fixa;
- SRA cu acordare automata (autoadaptive)
Structura si parametrii sistemelor din prima categorie sunt stabilite o data cu proiectarea si constructia sistemului in timp ce sistemele din a doua categorie isi pot modifica legea de reglare y=f(r) in timpul functionarii pe baza unor informatii asupra instalatiei tehnologice obtinute prin supravegherea permanenta a acesteia.
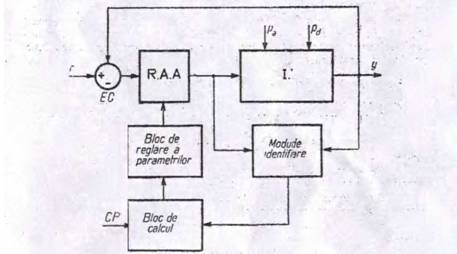
Fig 1.9 Schema bloc a unui SRA autoadoptiv.
Schema bloc a unui sistem SRA autoadoptiv este redata in figura 1.9. Regulatorul automat adaptiv (RAA) nu are parametrii constanti iar uneori nici structura fixa; impreuna cu instalatia tehnologica IT si elementul de comparatie EC el alcatuieste un SRA. Comportarea instalatiei tehnologice este in permanenta supravegheata de catre modulul de identificare ale carui semnale de iesire sunt furnizate blocului de calcul. Pe baza informatiilor astfel primite si pe baza criteriului de performanta CP, in acest bloc sunt calculate valorile parametrilor RAA pe care le fixeaza blocul de reglare a parametrilor.
7. Dupa caracteristicile lor constructive, SRA se divid in:
- specializate
- unificate.
Sistemele de reglaj automat specializate sunt destinate unui anumit proces tehnologic sau, in cel mai bun caz, unei clase restranse de procese tehnologice. Folosirea lor este limitata de urmatoarele dezavantaje:
- flexibilitate redusa;
- cost ridicat;
- intretinere costisitoare.
Sistemele de reglaj automat unificate se construiesc din
Elemente de automatizare care se pot intreconecta in mai multe moduri deoarece semnalele (marimile electrice) la
intrarea si la iesirea lor variaza in aceasi gama. Cele mai utilizate game de semnal unificat sunt: 2÷10 mA; 4÷20 mA; 0÷10 mA; -10V÷10V; 0÷5V; 1÷5V.
Elementele de automatizare care pot intra in componenta unui SRA pot fi clasificate ca in figura 1.10.
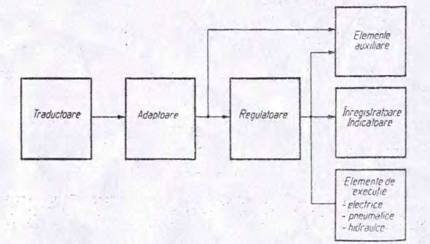
Fig. 1.10. Categoriile de elemente de automatizare care intra in competenta unui sistem automat
Traductoarele convertesc diverse marimi fizice neelectrice (presiune, temperatura, debit, pH etc.) intr-o marime electrica care nu variaza in gama unificata; de aici rezulta necesitatea adaptoarelor care convertesc semnalul dat de traductor in semnal unificat. Semnalul e(t) de la intrarea regulatoarelor ca si semnalul de comanda u(t) de la iesirea lor variaza in gama de semnal unificat.
Regulatoarele tipizate, fabricate in cadrul sistemelor unificate asigura functii de dependenta u=f(e) simple; aceste functii de dependenta denumite si ecuatii de functionare sunt prezentate in tabelul 1.1.
ECUATIILE DE FUNCTIONARE ALEREGULATOARELOR TEPIZATE
Tipul regulatorului
Ecuatii de functionare
P
u = Kre
PI
u =KR(e+![]()
![]() )
)
PD
u = KR(e+Td
![]()
PD1D2
u = KR(e+Td1 ![]() + Td2
+ Td2 ![]()
PID
u = KR(e+![]() edt+ Td
edt+ Td![]()
unde:
KR se numeste coeficient de amplificare;
T1 - constanta de timp integrare;
Td - constanta de timp derivare.
Pentru a intelege sensul fizic al constantelor de timp si pentru a dispune de metode practice de determinare a lor, este necesar sa se cunoasca raspunsul regulatoarelor PI si PD in regim tranzitoriu la variatii tipice ale marimii de intrare.
Astfel considerand ca la intrarea unui regulator PI se aplica un semnaltreapta:
e= ![]()
![]()
raspunsul acestuia reprezentat in figura 1.11 este de forma:
u= AKR(1+![]() ).
).
Se observa ca la t=Ti, u=2AKR ; in concluzie, constanta Ti este egala cu intervalul de timp dupa care marimea de iesire a unor regulator PI se dubleaza in raport cu saltul din origine atunci cand la intrare se aplica o marime treptata.
In mod analog, considerand ca la intrarea unui regulator PD se aplica un semnal rampa e=At, raspunsul acesteia (fig. 1.12) este de forma :
u=AKR (1+Td
Remarcand faptul ca la t=Td , u=2AKRTd se poate afirma ca Td
este egala cu intervalul de timp dupa care marimea de iesire a unui regulator PD se dubleaza in raport cu saltul in origine atunci cand la intrarea regulatorului se aplica un semnal rampa.
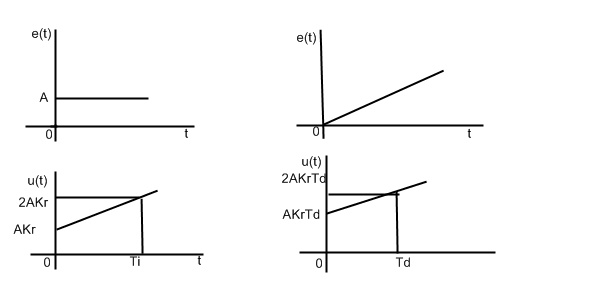
Fig. 1.11 Raspunsul regulatorului Fig. 1.1 Raspunsul regulatorului
P1 la un semnal treapta. PD la un semnal rampa
Regulatoarele PD sunt utile pentru ca amelioreaza comportarea in regiuni tranzitoriu a sistemelor automate.
In practica, in locul coeficientului KR se foloseste deseori banda de proportionalitate, definita ca raportul dintre domeniu de variatie e a marimii de intrare (fig. 1.13) corespunzator domeniului maxim de variatie a marimii de iesire umax si domeniul maxim de variatie a marimii e, emax
Pentru un sistem unificat rezulta :
B%= ![]() %.
%.
Rolul elementelor mentionate in ultima coloana din figura 1.10 este indicata clar de denumirile lor.Elementele auxiliare, de pilda, servesc la calcul, semnalizarea, alarma.
Echipamentele de automatizare unificate se caracterizeaza prin:
inalta flexibilitate si modularitate;
compatibilitate cu clase largi de procese tehnologice;
intretinerea simplificata.
8. Dupa natura elementelor constructive folosite, sistemele de
reglaj automat pot fi:
- electronice;
- pneumatice;
- hidraulice.
In cazul ultimelor doua categorii de SRA, semnalele ce se transmit de la un bloc la altul numai sunt de natura electrica ci sunt presiuni.
Este de remarcat ca in Romania se fabrica dinainte de 1970 un sistem complet de elemente de automatizare cu semnul unificat electric si mai multe elemente de automatizare pneumatice.
Cunostintele prezentate in continuare se refera, cu exceptia unor capitole, la sisteme automate monovalabile, liniare si continu.
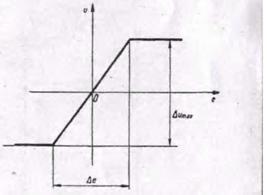
Fig 1.13. Caracteristica intrare-iesire a unui
regulator P
1.3. Regimurile de functionare ale sistemelor de reglaj automat
Regimul normal de functionare al unui SRA este regimul stational definit ca regimul in care marimile y si r au aceasi forma de variatie in timp.
In timpul functionarii SRA apar, insa, variatii ale marimii de referinta r(t), uneori impuse chiar prin program, ca si variatii ale marimilor perturbatoare. Ca urmare a variatiei, in SRA apare un regim tranzitoriu in timpul careia variatia in timp a marimii de iesire y(t) numai depinde de cea a marimii de referinta r(t) ci de strctura sistemului. In cursul acestui regim marimile reglate pot avea valori si variatii in timp nepermise care pot aduce chiar la distrugerea instalatiei tehnologice comandate; de aceea, cunoasterea regimului tranzitoriu este importanta pentru a se stabilii din proiectare masuri de protejare a instalatiilor si a procesului tehnologic.
Dupa terminarea regimului tranzitoriu, un SRA proiectat corect revine la un nou regim stationar.
1.4. Performantele sistemelor de reglaj automat
Pentru a se putea aprecia comportare SRA si pentru a le putea compara intre ele, este necesara definirea unor indicii de calitate sau performanta. Acestea pot fi clasificate in urmatoarele categorii:
1 - performante diferite cu ajutorul curbei de variatie in timp a semnalului de iesire y(t):
2 - performante definite cu ajutorul curbei de variatie in functie de frecventa a raportului dintre amplitudinea semnalului de iesire si amplitudinea semnalului de referinta atunci cand acesta este sinusoidal, de frecventa variabila. Aceasta diagrama se numeste raspunsul la frecventa;
3 - stabilitate.
1. Diagrama y(t) depinde de variatia in timp a semnalului de referinta r(t) si de variatia in timp a perturbatiilor.
Pentru a definii performantele SRA in raport cu intrarea se iau in consideratie pentru semnalul r(t) formle tipice de variatie in timp din figura 1.14. Dintre acestea, principalele performante se definesc cu ajutorul unui semnal treapta aplicat la intrare(vezi figura 1.14, a).
Performantele SRA pentru variatia treapta a semnalului de la intrarea.
In acesta situatie, semnalul de iesire, in mod ideal, ia forma unui semnal treapta de valoare yi. In realitate, el variaza in timp dupa una din curbele reprezentate in figura 1.15, stabilindu-se in final la o valoare yst (ystationar
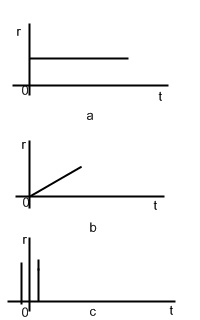
Fig 1.14. Forme tipice de variatie a marimii
De intrare al unui SRA
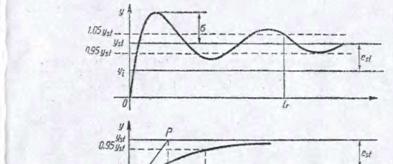
Fig. 1.15 Forme tipice de variatie a semnalului de iesire al unui SRA pentru un semnal de
intrare treapta
Curba y(t) poarta numele de raspuns indicial. Dupa cum se vede, raspunsul indicat poate avea unu dintre cele trei forme din figura 1.15:
raspuns tranzitoriu oscilant (fig. 1.15, a),
raspuns aperiodic fara inflexiune, (fig. 1.15, b si d),
raspuns aperiodic cu inflexiune.
Diferenta dintre curba reala y(t) si valoarea yi
3(t)=y(t)-yi
Se numeste eroare si, in cazul sistemelor bine reglate, trebuie sa tinda catre zero. In figura 1.15 diferenta yst - yti este marita pentru a putea fi observata. Daca legatura de reactie a SRA nu contine nici regulator nici traducator-ca in figura 1.14 semnalul 3(t) se confunda cu e(t).
Performatele SRA definite cu ajutorul diagramelor din figura 1.15, se impart in:
performante referitoare la regimul stationar;
performante referitoare la regimul tranzitoriu.
MǍSURI DE PROTECTIA MUNCI LA UTILIZAREAINSTALATIILOR SI ECHIPAMENTELOR ELECTRONICE
Mǎsuri de prevenire a electrocutǎrii la locul de muncǎ:
1.Asigurarea inaccesibilitǎtii elementelor care fac parte din circuitele electrice si care se realizeazǎ prin:
-amplasarea conductelor electrice,chiar izolate,precum si a unor echipamente electrice la o inǎltime inaccesibilǎ pentru om;
-izolarea electricǎ conductoarelor;
-folosirea carcaselor de protectie legate la pamant;
-ingradirea cu plase metalice sau tbǎlii perforate,respectandu-se distanta imusǎ panǎ la elementele de tensiune.
Folosirea tensiunii reduse (12,24 si 36V) pentru lǎmpile si sculele electrice portative.
3.Folosirea transformatoarelor coboratoare si sculele electrice portative.
4.Folosirea mijloacelor individuale de protectie si mijloacelor de avertizare:tije electroizolante,clesti izolanti,scule cu mǎnere izolante.
5.Mijloace auxiliare de protectie:echipamente de protectie(manusi,cizme) covorase de cauciuc,platform si gratare cu picioruse electrizolante din portelan.
6.Mijloace de avertizare:plǎci avertizoare,indicatoare de securitate,ingradiri prevazute cu plǎcute.
7.Deconectarea automatǎ in cazul aparitiei unei tensiuni de atingere periculoase sau a unor scurgeri de current de intensitate mare.
8.Separarea de protectie se realizeaza cu ajutorul unui transformator de separatie,se creaza un circuit izolat fatǎ de pǎmant.
9.Protectia prin legarea la mǎmant-carcase metalice.
Se folosesc prize de pǎmant vertical sau orizontale,se realizeaza astfel incat diferenta de potential la care ar putea fi expus prin atingere direct sǎ nu fie mai mare de 40V.
Rezistentele prizelor de pǎmant se urmǎresc si se verificǎ periodic cu urmǎtoarele valori:
Rp≤4Ω prizǎ de pǎmant de protectie
Rl≤2Ω prizǎ de lucru
Rm≤80Ω prizǎ de mǎsurǎ
Se urmǎreste ca rezistenta de izolatie a masinilor electrice si a echipamentelor sǎ fie cea normal,iar pǎrtile neconductoare sǎ fie puse la masǎ.Rezistenta de izolatie a infǎsurǎrilor masinilor fata de carcasa lor si intre infǎsurǎri sǎ aibǎ valorile:
Riz >5MΩ la rece;
Riz>2MΩ la cald(in sarcinǎ)
Gravitatea electrocutǎrii este datǎ de:intensitatea curentului care trece prin corp este de 0,010-0,050A,in cazul curentului alternative si 0,050-0,090A,in cazul curentului continuu,insǎ accidentatul nu se poate elibera singur de sub actiunea curentului;daca intensitatea curntului depǎseste 0,090A in curent continuu sau 0,050A in current alternative se produce fibrilatia inimii si moartea victimei,durata trecerii curentului panǎ la deces este de 0,1-0,2s.
Electrocutarea se poate produce prin atingere direct sau indirect a surselor de alimentare.
Electrocutarea prin tensiune de pas reprezintǎ atingerea simultanǎ a douǎ puncte de pe sol sau de pe pardosealǎ,din apropierea unei scurgeri de curent si care se afla la potentiale diferite UB>UC,UPAS=UB-UC dau nastere la accidente.
Cauzele accidentelor prin atingere direct:
●deteriorizarea izolatiei dintre conductor si carcasǎ;
●cǎderea unui conductor pe carcasa unui utilaj;
●producerea unui arc alectric intre un element aflat sub tensiune si o carcasǎ,o ingrǎdire,un stelaj.
●lipsa sau deteriorarea instalatiilor de protectie.
CAPITOLUL III
CONCLUZII
Prin automatizarea proceselor de productie se urmǎreste eliminarea interventiei directe a omului in aceste procese,asigurandu-se desfǎsurarea lor in conformitate cu anumite cerinte impuse,fǎrǎ interventia operatorului.
Sistemele de reglare automatǎ (SRA) asigura o anumitǎ variatie in timp a uneia sau a mai multor mǎrimi de iesire y1 ym ale instalatiei tehnologice in functie de evolutia in timp a uneia sau mai multor mǎrimi de intrare r1...rm
Traductoarele convertesc diverse mǎrimi fizice neelectrice intr-o mǎrime electric care nu variazǎ in gama unificatǎ.Semnalul de la intrarea regulatoarelor ca si semnalul de comandǎ de la iesirea lor variazǎ in gama de semnal unificat.
Regulatoarele tipizate,fabricate in cadrul sistemelor unificate asigurǎ functii de dependentǎ simple.
Regimul normal de functonare al unui SRA este regimul stational definit ca regimul in care mǎrimile y si r au aceias formǎ de variatie in timp.
Dupǎ terminarea regimului tranzitoriu,un SRA proiectat correct revine la un nou regim stationar.
Pentru a se putea aprecia comportarea SRA si pentru a le putea compara intre ele,este necesarǎ definirea unor indicia de calitate sau performantǎ.
Diafragma depinde de variatia in timp a semnalului de referintǎ si de variatia in timp a perturbatiilor.
Bibliografie
4. Ceanga E. Tusac I. , Miholca C.-"Electronica industriala si automatizari"- EHT. BUC. 1979
5. Constantin P. Barca-Galareanu }.a. -"Electronica Industriala"- EDH -BUC.-1976
6. Maican S. -"Sisteme numerice cu circuite integrate" ETH-BUC. 1980
7. Dancia I. -" Micro-procesoare arhitectura interna", E. Dacia- Cluj-Napoca - 1979
8. Savescu M. , si . a. -"Circuite Electronice"vol. I,II,III, ETH, BUC.-1987-1989
9. Cartureanu V.Iancu O. si.a. -"Materiale si componnte electronice"
EDP. BUC. 1972
10. Internet -Electronica si automatizari