|
|
|
|
Roboti Industriali
1.1.Robotica in istoria omenirii
Domeniul de stiinta Robotica si fenomenul "robot", au aparut in cea de a doua jumatate a secolului XX. Aparitia lor se incadreaza in linia de evolutie a vietii si in acest cadru, a omenirii. Acest lucru se datoreaza cresterii productivitatii.
La inceputul omenirii actionarea asupra mediului se facea folosind energie biologica
![]()
Mai tarziu omul actioneaza cu ajutorul uneltelor asupra mediului folosind propria sa energie biologica.
O data cu evolutia omenirii si cresterii productivitatii pe plan local a dus la perfectionarea uneltelor si la necesitatea utilizarii unor energii suplimentare, aceasta energie sa gasit la animalele domestice.
Dezvoltarea societatii, cresterea complexitatii si volumului interactiunii cu mediu duce la un consum mare de energie, care impinge civilizatia umana spre etapa "masinismului'.
Etapa "masinismului' este cunoscuta si sub denumirea de prima revolutie tehnico - stiintifica, este cea in care tehnica incepe tot mai mult sa se dezvolte pe baza stiintei, deci a cunostintelor omenirii despre mediu, avand pe langa aspecte concrete o pondere din ce in ce mai mare de aspecte abstracte.
Mecanizarea a condus la o accelerata "crestere a productivitatii", la dezvoltarea societatii umane, la cresterea bunastarii acesteia, ceea ce a permis la randul ei dezvoltarea tehnicii.
Etapa "automatizarii" se realizeaza ca urmare a unui aport crescut al cercetarii stiintifice in dezvoltarea tehnica, a doua revolutie stiintifico - tehnica.
Se caracterizeaza prin dezvoltarea domeniilor de varf ale tehnicii prin patrunderea masiva a utilizarii calculatoarelor iar in mod paralel are loc si etapa "mecanizarii" activitatilor umane, mai ales a acelora care nu au fost suficient de afectate de acest proces.
Etapa "automatizarii" prezinta doua faze distincte, diferentiate prin natura proceselor asupra carora se aplica.
Procesele pot fi:
o naturale
o artificiale:sunt cauzate de interventii ale omului. "Procesele automate" sunt procese artificiale
Procesele artificiale pot fi:
o Continue sunt acelea care o data declansate se desfasoara in mod continuu, pana cand conditiile de mediu necesare sunt asigurate. Continuitatea este asigurata de operatorul uman in solutiile clasice iar prin diferitele mecanisme, termostate, regulatoare, presostate, etc., la cele automatizate.
o Discontinue sunt acelea care prin compunerea lor din mai multe secvente cu inceput si sfarsit, ale caror derulare se interconditioneaza reciproc si a caror continut este de complexitate mai mare decat in cazul proceselor continue. Secventa este o parte distincta din proces, avand actiuni caracteristici proprii. Discontinuitatea este asigurata de operatorul uman, cand intervine in secventele procesului cu mana sa. Pentru a asigura automatizarea proceselor discontinue este necesar sa se realizeze sisteme tehnice, care sa poata realiza automat operatii inteligente de manipulare similare omului. Asemenea sisteme sunt robotii.
1.2.Introducere. Clasificarea robotilor industriali conform I.S.O.
Robotul poate fi definit ca o instalatie pentru automatizarea operatiilor pe care in conditii "clasice" le realizeaza omul, cu mana sa, sub supravegherea ochiului, coordonarea ochi-mana realizandu-se de catre creier. Pe langa roboti, operatii de manipulare executa si manipulatoarele.
Din cele de mai sus putem realiza urmatoarele definitii:
Avem doua mari categorii de roboti :
Ficsi, cei care sunt imobili fata de anumite componente ale mediului in care evolueaza
Mobili, cei care se pot deplasa, folosind in acest scop:
roti
senile
prin pasire
tarare.
Vehiculele ghidate automat sunt roboti mobili, cu deplasare pe roti / senile.
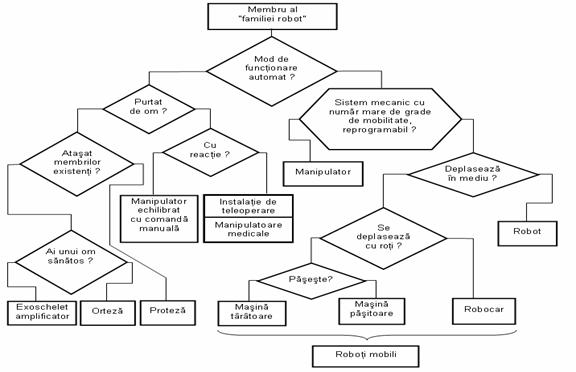
Familia robotilor este compusa din:
o robotii
o manipulatoarele
o instalatiile de teleoperare
o protezele
o ortezele
o manipulatoarele medicale
o exoscheletele amplificatoare
o vehiculele ghidate automat
o masinile pasitoare si taratoare
Toate care se aseamana structural (au un sistem de conducere, unul de actionare si unul mecanic) si constructiv (au ca baza mecanisme cu cuple cinematice inferioare), realizeaza familia roboti.
"Inteligenta" este capacitatea mai mare sau mai mica a sistemelor naturale sau artificiale de a se adapta cerintelor mediului.
Inteligenta artificiala este aplicatia majora a calculatoarelor.
In tabelul de mai jos este dat componenta "familiei robotilor" din punctul de vedere al "inteligentei" artificiale.
NR
CRT
Capacitate
Nu se aseamana cu omul
Se aseamana cu omul
1
Poate repeta programe invatate
Automaton
Automan
2
Este si mobil
Mechanoid
Mandroin
3
Are senzori si calculator implantat
Android
Humanoid
4
Este adaptiv si heuristic
Cyborg
(cybernetic organism)
Syman
(synthetic man)
5
Are capacitati fizice si intelectuale supraumane
Hyborg
Supersyman
Robotii industriali se incadreaza in procesul automatizarilor industriale.
Evolutia in timp de la simplu la complex a automatizarilor industriale este data in tabelul de mai jos, incepand de la treapta 1, in care masina de lucru este mana umana, si ajungand la treapta 10, in care masina de lucru este masina care se autoperfectioneaza.
surse de informatii
Energia folosita pentru actionarEa miscarilor
TreaptA
DESCRIEREA masinii de lucru
Robot
Mediu exterior
Electrica
Hidraulica
Pneumatica
10
Masina care se autoperfectioneaza
Robot cu comanda cu retele neuronale
Program variabil
9
Masina cu comanda adaptiva
Robot inzestrat cu senzori
8
Masina care isi core-leaza programul cu conditiile exterioare
Programa-bilitate
7
Masina cu comanda numerica (NC)
Robot programabil "on-line", "off-line"
6
Masina monooperatie programabila
Program
fix
5
Masina automata pentru operatii multiple
Manipulator
4
Masina automata monooperatie
Om
Umana
3
Masina automata si scula de mana
Nu exista
2
Scula de mana
1
Mana
Istoria tehnicii arata ca oamenii realizeaza sisteme tehnice atunci cand practica -evolutia societatii cere rezolvarea unor anumite probleme. Necesitatea automatizarii operatiilor de manipulare a materialelor radioactive a aparut dupa incheierea celui de-al doilea razboi mondial.
Dezvoltarea sistemelor robotizate in istorie
La inceputul anilor 1950, in laboratoarele nucleare din Franta si apoi, in Statele Unite ale Americii se construiesc primele instalatii de teleoperare, folosite pentru manipularea materialelor radioactive in spatii expuse radiatiilor. Tehnica mecanismelor spatiale articulate din aceste instalatii este dezvoltata mai departe, prin inlocuirea comenzii si actionarii de catre om, cu utilizarea calculatoarelor si a actionarii hidraulice.
George Devol proiecteaza in 1954 un robot programabil, il breveteaza in SUA in 1956 si il realizeaza, impreuna cu Joseph Engelberger, creatorul primului robot UNIMATE a firmei UNIMATION (cu actionare hidraulica). Robotul UNIMATE este instalat in prima sa aplicatie de catre concernul FORD pentru servirea unei masini de turnat sub presiune in anul 1961.
In anul 1966, inginerul Ole Molaug proiecteaza un automat de vopsire pentru fabrica de masini agricole TRALLFA din Bryne (Norvegia).
In 1973, Richard Hohn dezvolta pentru corporatia Cincinnati Milacron un robot comandat de un minicalculator. Robotul este denumit "The Tomorow Tool" (T3).
In 1974 firma suedeza ASEA produce primul robot industrial actionat electric sub denumirea Irb 6, urmat in 1975 de robotul Irb 60. In 1977, robotii ASEA sunt comandati de microcomputere. In 1990, concernul Brown-Bovery Robotics cumpara diviziunea de robotica a lui Cincinnati Milacron, toti robotii fabricati in continuare fiind denumiti ABB.
In 1978, firma UNIMATE construieste cu ajutorul comparatiei GENERAL MOTORS, robotul PUMA ("Programable Universal Machine for Assembly", "masina universala programabila pentru operatii de asamblare"), versiunea industriala a lui VICARM.
In deceniul anilor '90 se remarca o oarecare stagnare a sporirii aplicatiilor robotizate - datorita unor circumstante economice, mai ales in Japonia - cat si "saturarea" din punct de vedere stiintific al roboticii industriale, determinata de solutionarea tehnica, practic a tuturor problemelor specifice posibile.
In anii 1990 - 1996 apar tot mai multe constructii si aplicatii in domeniile serviciilor si a medicinei recuperatorii.
Raportul dintre numarul de roboti instalati si numarul persoanelor angajate in industrie in diferite tari (a) si numarul si destinatia robotilor instalati pentru prestari de servicii (b), sunt date in tabelele de mai jos:
Notiunea de robot este codificata in mod diferit in diverse standarde sau formulari ale unor institutii de specialitate:
Normele franceze (Normalisation française, NF) :
o norma E61 - 005 defineste manipulatorul:"Structura mecanica constituita dintr-o serie de elemente articulate sau alunecatoare unul fata de celalalt, utilizat pentru a prinde, deplasa, pozitiona si orienta obiecte (piese, scule, etc), urmarind in general mai multe grade de libertate. El poate fi comandat de un operator, de un automat programabil electric sau prin orice sistem logic (dispozitiv cu came, logica cablata, logica programata, etc.) independent sau asociat".
o norma franceza NF61-100 da urmatoarea definitie:"Robotul este un mecanism de manipulare automata, aservit in pozitie, reprogramabil, polivalent, capabil sa pozitioneze si sa orienteze materiale, unelte sau dispozitive specializate, in timpul unor miscari variabile si programate, destinate executarii unor sarcini variate".
Standardul german DIN 2801 defineste:
o "Robotii industriali sunt automate mobile cu aplicatii universale, cu mai multe axe, ale caror miscari sunt liber programate pe traiectorii sau unghiuri intr-o anumita succesiune a miscarilor si in anumite cazuri, comandate prin senzori. Ei sunt echipati cu dispozitive de prehensiune, scule sau alte mijloace de fabricatie si pot indeplinii activitati de manipulare si de fabricatie. Robotul industrial poate fi montat fix, intr-un anumit loc sau poate fi deplasat ca un ansamblu."
Standarde japoneze:
o "Robotul este un sistem mecanic, dotat cu functiile motoare flexibile analoage cu cele ale organismelor vii sau imitatii ale acestora, cu functii inteligente, sisteme care actioneaza corespunzator vointei omului".
Standarde rusesti
o "Robotul industrial este o masina automata stationara sau deplasabila, constand din dispozitivul de executie, avand mai multe grade de libertate si din dispozitivul reprogramabil de comanda dupa program pentru indeplinirea in procesul de productie a functiilor motoare si de comanda".
Institutul de Robotica din America (RIA):
o 'Robotul este un manipulator reprogramabil multifunctional, destinat sa deplaseze materiale, piese, scule sau aparate, prin miscari programate variabil, in scopul indeplinirii unor sarcini diferite. Robotul este un echipament cu functionare automata, adaptabil conditiilor unui mediu complex - in care el evolueaza - prin reprogramare, reusind sa prelungeasca, sa amplifice si sa inlocuiasca una sau mai multe din functiile umane in actiunile acestuia asupra mediului inconjurator.'
Asociatiei Britanice de Robotica (British Robot Association):
o "robotul este un dispozitiv reprogramabil, realizat pentru manipularea pieselor, sculelor si altor mijloace de productie, prin miscari variabile programate, pentru a indeplinii sarcini specifice de fabricatie".
Denumirea de robot se aplica unei familii mai largi, din care fac parte:
manipulatorul;
instalatia de teleoperare;
proteze / orteze;
manipulatoare medicale;
exoschelete amplificatoare;
masini pasitoare;
masini taratoare.
Schema de mai jos defineste familia de roboti:
Clasificarea robotilor industriali conform I.S.O
a) sursa principala de putere pentru actionare
n pneumatica
n hidraulica
n electrica
b) comanda miscarii
n punct cu punct sau fara comanda de viteza : continua sau discontinua
n comanda pe traiectorie continua
c) modele de programare
n prin invatare directa
n prin generare de traiectorie
n off-line
d) tipuri de senzori folositi
n detectori de pozitie
n logica liniara simpla
n senzori de semnale proportionale cu abaterea
Asociatia Franceza de Robotica Industriala (A.F.R.I.) propune urmatoarea clasificare a robotilor industriali:
Manipulatoare cu :
n comanda sau telemanipulatoare
n automate cu cicluri prereglate: pneumatice, electrice sau electronice
Roboti :
n programabili controlati in bucla de pozitie, cu traiectorie continua sau deplasare punct cu punct
n inteligenti, avind senzori care exclud logica binara simpla si indeplinesc diferite sarcini cu ajutorul sistemelor de recunoastere a formelor
4.Structura Robotului
Structura unui robot este, defapat, un sistem compus din mai multe subsisteme. Sistem este un ansamblu de parti componente, elemente, si legaturile dintre acestea. Elementele care compun acest sistem se numesc subsisteme. La randul lor subsistemele pot avea si ele subsisteme, din acest motiv exista o ierarhizare si anume sistemul principal se numeste sistem de rangul 1, subsistemele se numesc sisteme de rangul 2, etc.
Modul cum se compune un sistem din subsisteme si legaturile dintre aceste subsisteme definesc structura unui sistem. Aceasta compunere a sistemelor din subsisteme se evidentiaza prin scheme bloc, iar legaturile dintre subsisteme, prin matrici de cuplare (care definesc legaturile dintre 'intrarile' si 'iesirile') si matrici de structura (care ne arata care subsisteme sunt in legatura).
Robotul este un sistem de rangul 1, si se aseamana, constructiv, cu sistemul unui om, la fel si subsistemele robotului.
Schema bloc al structuri unui robot este:
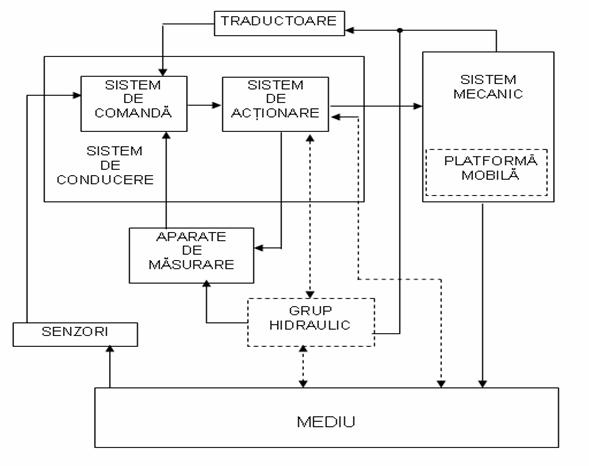
Sistemul unui robot comunica cu mediul si este compus din urmatoarele:
o Sistemul mecanic al robotului care are rolul scheletului uman, astfel defineste natura si amplitudinea miscarilor ce se pot realiza.
o Sistemul de actionare realizeaza miscarea relativa a elementelor mecanismelor din sistemul mecanic, si are rolul sistemului muschiular al omului.
o Sistemul de comanda emite comenzi catre sistemul de actionare si prelucreaza informatii preluate de la sistemul mecanic, de actionare si de la mediu, are rolul sistemului nervos uman.
o Traductorii si aparatele de masura preia informatii despre starea interna a robotului, adica deplasari, viteze, acceleratii relative, debite, presiuni, temperaturi.
o Senzorii preia informatii despre starea "externa' a robotului, caracterizata prin parametrii mediului (temperatura, presiune, compozitie, etc.) si actiunea acestuia asupra robotului (forte, cupluri, etc.).
Traductorii si senzori au rolul organelor de simt.
o Platformei mobile are rolul de a realiza deplasarea robotilor mobili si face parte din componenta sistemului mecanic, cu rolul aparatului locomotor al omului.
o Sistemul de conducere este un sistem de rang superior al sistemului mecanic si este compus din sistemul de comanda si cel de actionare.
Robotii actionati hidraulic contin un grup hidraulic pentru prepararea si realizarea circulatiei fluidului purtator de energie (ulei). Acest grup joaca rolul aparatului digestiv si a celui respirator / circulator al omului.
Se intelege prin 'mediu' al robotului spatiul in care acesta evolueaza, cu obiectele continute si fenomenele care au loc in acest spatiu. Totalitatea obiectelor cu care robotul interactioneaza constituie 'periferia' acestuia.
Legaturile dintre componentele robotului si a componentelor care realizeaza legaturile cu mediu sunt :
Legaturi directe avem la sistemul de comanda atunci cand transmite comenzi la sistemul de actionare, iar acesta actioneaza asupra cuplelor cinematice conducatoare, axele, sistemului mecanic, care la randul sau, actioneaza asupra mediului cu efectorul final.
Legaturi inverse sunt informatiile furnizate sistemului de comanda de catre traductoare, senzori si aparate de masura.
Se mai considera legaturi si fluxul de energie dat de mediu sistemului de actionare al robotului, si fluxul de energie disipat de la robot la mediu.
1.3.Sistemul mecanic al robotului
In cazul general un robot industrial trebuie sa realizeze:
actiuni asupra mediului inconjurator, cu efectori finali;
perceptie, pentru a culege informatii din mediul de lucru, cu senzori si traductori;
comunicare, pentru schimb de informatii;
decizie, in scopul realizarii unor sarcini.
Pentru realizarea acestor functii, structura unui robot este alcatuita din:
sistemul mecanic;
sistemul de actionare;
sistemul de programare si comanda;
sistemul senzorial.
Sistemul mecanic este constituit din mai multe elemente legate intre ele prin cuple cinematice.
Sistemul de actionare serveste la transformarea unei anumite energii in energie mecanica si transmiterea ei la cuplele cinematice conducatoare.
Sistemul de comanda si programare este un ansamblu de echipamente si de programe care realizeaza miscarea robotului.
Sistemul senzorial reprezinta un ansamblu de elemente specializate transpunerea proprietatilor ale diferitelor obiecte in informatii.
Sistemul mecanic al robotului are rolul sa asigure realizarea miscarilor acestuia si transmiterea energiei mecanice necesare interactiunii cu mediul. Adica are sarcina de a deplasa un obiect. Partea din sistemul mecanic care realizeaza aceasta deplasare se numeste dispozitiv de ghidare sau manipulator.
Se intelege prin manipulare modificarea situarii in spatiu a unui obiect. Utilizarea mainii de catre om a determinat formarea cuvantului de manipulare. Manipularea obiectului se realizeaza prin modificarea situarii bazei efectorului final, cu care obiectul este solidarizat. In acest scop, baza efectorului final este solidarizata cu un element al dispozitivului de ghidare.
Dispozitivul de ghidare are rolul de a da efectorului final miscarile si energia mecanica necesara miscari in conformitate cu actiunea necesitata asupra mediului.
Subsistemul din cadrul sistemului mecanic dedicat acestei interactiuni este efectorul final.
Efectorul final al robotului care manipuleaza obiecte se numeste dispozitiv de prehensiune. Din punct de vedere al teoriei mecanismelor, obiectul si partea de baza a dispozitivului de prehensiune formeaza o cupla cinematica de clasa a VI-a, inchisa deobicei prin forta.
Dispozitivele de ghidare pot fi cu:
topologie seriala,
paralela
mixta.
Structura sistemului mecanic al unui robot este :
Situarea, adica pozitia - orientarea, unui corp in spatiul tridimensional este definita cu ajutorul pozitiei punctului caracteristic, si orientarilor dreptei caracteristice, respectiv a dreptei auxiliare.
Punctul caracteristic si dreapta caracteristica / auxiliara la un obiect cilindric se reprezinta astfel :
Se intelege prin:
o 'Punct caracteristic', un punct al obiectului, folosit pentru definirea pozitiei acestuia.
o 'Dreapta caracteristica' este o dreapta care trece prin punctul caracteristic.
o 'Dreapta auxiliara' o dreapta perpendiculara in punctul caracteristic pe dreapta caracteristica.
Cu ajutorul dreptelor caracteristice si auxiliare se defineste orientarea obiectului, de care apartin ambele drepte.
In modelul matematic al sistemului mecanic al robotului, punctul caracteristic este originea, iar dreptele caracteristica si auxiliara reprezinta axe ale unui sistem de referinta cartezian drept legat de obiect.
In variantele cu topologie seriala, un mecanism component al acestuia, numit mecanism generator de traiectorie (mecanism de pozitionare), realizeaza modificarea pozitiei punctului caracteristic si altul, numit mecanism de orientare, realizeaza orientarea dreptelor caracteristic si auxiliar.
Se poate defini:
o mecanismul generator de traiectorie ca fiind 'bratul' al robotului;
o mecanismul de orientare ca fiind 'articulatie carpiana', sau 'mecanismul carpian' ('wrist') al robotului.
Efectorul final are mai multe variante constructive:
o Efectorul final al robotului care prelucreaza obiecte este o scula.
o Efectorul final al robotului care misca obiecte este manipulatorul.
Energia necesara pentru prelucrare este comunicata sculei prin intermediul robotului sau a unei surse suplimentare de energie, in acest caz efectorul final este un cap de forta cu scula. Capul de forta contine un motor si eventual o transmisie mecanica.
Platforma mobila este o parte componenta a sistemului mecanic care asigura modificarea situarii intregului ansamblu in mediu.
Platforma mobila defineste tipul robotului:
Robot stationar atunci cand nu este inzestrat cu platforma mobila;
Robot mobil cand este inzestrat cu platforma mobila, in acest caz dispozitivul de ghidare modifica situarea obiectului in raport cu platforma mobila.
1.4.Constructia modulara a robotilor
Constructia modulara este caracterizata prin:
Modul al unui robot este un subansamblu care este corelat cu una sau mai multe cuple cinematice ale dispozitivului de ghidare si cu efectorul final.
Modulul de robot corelat cu cupla cinematica conducatoare are partile 'fixe' ale sistemului de actionare aferent cuplei cinematice conducatoare si traductoarelor / senzorilor, solidarizate cu structura de rezistenta a unuia dintre elemente (i sau i+1). Legatura dintre doua module vecine se realizeaza prin intermediul structurii de rezistenta a elementului i. In acest mod, intregul robot cu dispozitivul de ghidare in topologie seriala este de fapt constituit din 'legarea in serie' a unui numar de module.
Modulul de robot corelat cu o singura cupla cinematica poarta o denumire care este definita dupa functia lui in cadrul robotului.
Astfel, exista module de:
translatii de baza;
de pivotare de baza;
de ridicare a bratului;
de basculare a bratului;
de extensie a bratului;
de pronatie - supinatie;
de flexie - extensie;
de aductie - abductie.
Ele sunt reprezentabile schematic dupa normele ISO .
Modulul de orientare al unui robot se coreleaza cu toate cuplele cinematice ale mecanismului de orientare, continand de atatea ori componentele enumerate pentru modulul corelat cu o singura cupla cinematica conducatoare, cate cuple cinematice conducatoare are mecanismul de orientare.
In figura de mai jos se prezinta corelatia dintre structura sistemica si cea modulara (functional - constructiva) a unui robot avand un dispozitiv de ghidare serial cu M =
![]()
![]()

Schema
structurala modulara a robotului
In care:
T/S - Traductoare/Senzori;
SSA - Subsistem de actionare;
CCC - Cupla cinematica conducatoare;
A/B/C - Modulul;
EF - Efector final;
ELi Elementul i (i = 0, 1, 2, 3)
Efectorul final se considera de regula un modul al robotului ca si sistemul de comanda (cu exceptia traductoarelor / senzorilor inglobati in alte module).
In urmatoarele figuri (a,b,c,d) se prezinta desenele de subansamblu ale unor module de roboti.
In cazul robotilor avand dispozitive de ghidare cu topologie paralela sau mixta, un modul al structurii functional - constructive este constituit din doua platforme legate intre ele prin conexiuni . in figura de mai jos se prezinta un modul de orientare cu doua grade de libertate actionat electric, avand pe axa de supinatie o transmisie armonica
Structura functional - constructiva cu module tipizate a robotilor constituie o dezvoltate mai departe a conceptiei constructive cu module tipice ale acestora.
Prin modul tipizat al unui robot se intelege un modul din cadrul unei structuri constructiv - functionale, care constituie un subansamblu de sine statator, interschimbabil cu alte module, facand parte dintr-o serie de module tipizate si care poate fi asamblat cu alte module tipizate, in conformitate cu cerintele utilizatorului.
In urmatoarea figura se prezinta module tipizate din cadrul unor structuri functional-constructive de robot constituit din module. Ele pot fi asamblate in structuri diferite intr-o conceptie 'baukasten', formand o familie de roboti compusi din module tipizate.
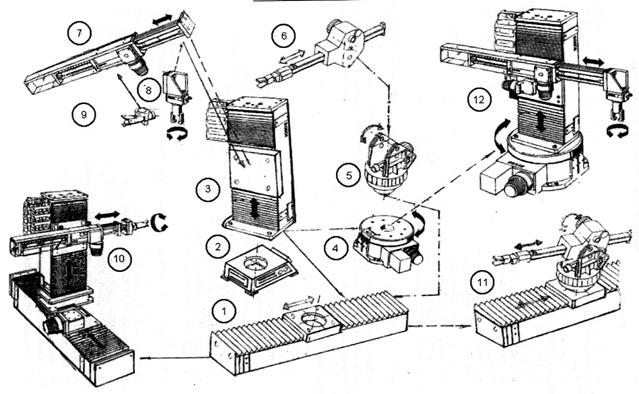
In care:
1 - Modul de translatie de baza
2 - Batiu
3 - Modul de ridicare brat
4 - Modul de rotatie de baza
5 - Modul de basculare brat
6, 7 - Module de extensie brat
8, 9 - Module de orientare
10 - Robot cu mecanism generator de TTT, obtinut prin combinarea modulelor 1+3+7
11 - Robot cu mecanism generator de traiectorie TRRT, obtinut prin combinarea modulelor 1+4+5+6
12 - Robot RTT obtinut din modulele 4+3+7
Ideea dezvoltarii unor familii de roboti construiti din module interschimbabile a fost apreciata de constructorii de roboti in deosebi la inceputul anilor 1980. Datorita inmultirii numarului aplicatiilor industriale ale robotilor si a concentrarii fabricatiei de roboti la un numar mai redus de firme care fabrica mai multi roboti pe an, s-a ajuns dupa 1990 la diminuarii constructiei robotilor din module tipizate.
1.5. Utilizarea robotilor industriali.
Robotii se utilizeaza in toate domeniile activitatii umane. Ele urmaresc satisfacerea unor necesitati individuale, de grup sau sociale, realizand economia. Economia se imparte in sectoare si domenii.
Tab. 1
NR
CRT
DOMENIUL ECONOMIC
SECTORUL
0
Agricultura si silvicultura, zootehnie si piscicultura
Primar
1
Gospodarirea energiei, alimentarea cu apa, extractia materiilor prime
Secundar
2
Activitati de prelucrare
3
Activitati de constructii
4
Comert
Tertiar
5
Circulatie si transport
6
Institutii de credit si asigurare
7
Prestari de servicii fara scop de castig
8
Gospodarii private
9
Institutii regionale si asigurari sociale
Productia apare in toate sectoarele economiei si anume in sectoarele primare si secundare, productia materiala, iar in sectoarele tertiare preponderenta devine productia nemateriala si anume a serviciilor.
Robotul industrial poate manipula:
obiecte de lucru
scule
In tabelul de mai jos se prezinta domeniile de aplicatie ale robotilor industriali.
Robotul industrial manipuleaza
Nr crt
Obiecte de lucru
Nr crt
Scule
Domeniul de aplicatie
Domeniul de aplicatie
1.
Servirea unor masini
utilaje/instalatii/dispozitive
4
Furnal (desfundare canal de turnare)
1.1
Cuptoare de otelarie (incar-care, manipulare lingouri)
4.1
Formare
1.2
Laminoare (manipulare lin-gouri, laminate)
5
Prelucrarea unor semifabri-cate
1.3
Utilaje de miezuit
5.1
Turnate, demaselotare
1.4
Cubilouri (incarcare, ma-nipulare oale de turnare)
5.2
Turnate, curatire
1.5
Masini de turnat sub presiune
5.3
Turnate, forjate, aschiate, debavurare si polizare
1.6
Utilaje de turnare de precizie
6
Sablare
1.7
Utilaje de tratament termic (cuptoare, bai)
7
Prelucrarea unor semifabricate
1.8
Ciocane si prese de forjare
7.1
Prin aschiere
1.9
Ciocane si prese de matritare la cald
7.2
Prin fascicul laser
1.10
Masini de forjat orizontale
7.3
Prin jet de apa cu inalta presiune
1.11
Prese de matritare si stantare la rece
8
Sudare
1.12
Utilaje de presat materiale plastice
8.1
Prin presiune in puncte
1.13
Cuptoare de uscat
8.2
Cu arc in mediu de gaz protector
1.14
Utilaje fixe pentru deba-vurare, demaselotare, cu-ratire, sablare sudare, vop-sire
9
Lipire
10
Metalizare
1.15
Masini unelte de prelucrat prin aschiere
11
Vopsire
11.1
11.2
Umeda
1.16
Masini unelte de prelucrat prin procedee neconven-tionale
Uscata
1.17
Masini de lucru in industria alimentara, textila, de pielarie, de incaltaminte, a lemnului, etc.
12
Masurare, control de calita-te, testare
1.18
Dispozitive ale instalatiei aducatoare / de evacuare
13
Operatii in "camere curate"
2
Paletizare / depaletizare
14
3
Montaj
In figurile de mai jos se prezinta diferiti roboti industzriali:
Definitii utilizate la roboti industriali sunt:
o Prin "paletizare / depaletizare" se intelege operatia de asezare / scoatere a obiectelor din locasurile depozitelor tip paleta.
o Prin "montaj" ("asamblare") se intelege operatia de constructie a unui ansamblu prin imbinarea mai multor obiecte de lucru componente.
o Prin "faza de operatie" se intelege secventa componenta a operatiei aferenta unui obiect de lucru din multimea obiectelor de lucru manipulate
o In timpul fazei de montaj propriu-zis, robotul industrial trebuie sa fie condus dupa un program de traiectorie continua.
o Prin "servire" se intelege operatia de introducere a obiectului de lucru in masina / utilajul / instalatia / dispozitivul in care se produce operatia de prelucrare si extragerea lui dupa terminarea prelucrarii.
In timpul operatiilor robotizate de prelucrare cu scule purtate se necesita reglarea / ascutirea / curatirea periodica a sculelor. De acesta, in componenta sistemului de fabricatie robotizat se vor prevede posturi de lucru automate care permit executarea operatiilor amintite, cuprinse in ciclogramele de lucru ale sistemului si in programele de comanda aferente.
Flexibilitatea robotului in aplicatiile in care acesta manipuleaza scule este asigurata prin reprogramare, respectiv prin posibilitatea schimbarii efectorului final, inclusiv automat, robotul conlucrand in acest caz cu un depozit automat de scule / capete de forta cu scule.
Sistemele de fabricatie in care robotul executa operatii tehnologice cu scule purtate pot cuprinde si instalatii aducatoare / de evacuare cu dispozitive de transfer si roboti de manipulare a obiectelor si dispozitivelor de lucru in operatii de "servire".
Domenile de aplicatie in care robotul manipuleaza scule, sunt:
n Destuparea manuala a canalului de turnare la furnale este o operatie cu un inalt grad de dificultate fizica si periculoasa pentru integritatea operatorului uman care executa operatia. El poate fi inlocuit de o instalatie de teleoperare, care manipuleaza un ciocan de perforat actionat pneumatic (un cap de forta), cu care operatia de destupare se realizeaza prin lovituri mecanice.
n confectionarea formelor de turnatorie, unele dintre ele nu se pot executa prin vibrare si necesita indesarea pamantului de turnare prin batere. Aceasta operatie poate fi executata de robot (instalatii de teleoperare), care manipuleaza un cap de forta cu scula de indesare (de "batere") actionata pneumatic.
n Demaselotarea si curatirea pieselor turnate, debavurarea si polizarea pieselor turnate, forjate sau prelucrate prin aschiere se realizeaza folosind scule adecvate, actionate prin capete de forta manipulate de roboti. Dificultatea operatiei consta in geometria neregulata, imprevizibila a obiectelor de lucru supuse prelucrarii. Se folosesc instalatii de teleoperare cu reactie de forta / moment sau roboti industriali condusi adaptiv, pe baza informatiilor furnizate de senzori de forta / moment.
n Sudarea prin presiune in puncte utilizeaza ca efector final al robotului un cleste de sudare, al carui electrozi sunt presati pe componentele de tabla care urmeaza a fi asamblate.Robotul trebuie sa pozitioneze electrozii in punctul de sudura de executat si sa orienteze axa comuna a acestora, normala pe suprafetele componentelor de tabla. Transferul clestilor de la un punct de sudura la altul poate fi realizat dupa un program punct cu punct (PTP).Dispozitivul de ghidare al robotului de sudare prin presiune in puncte trebuie sa aiba cel putin 5 grade de mobilitate, sa asigure acceleratii mari la trecerea de la un punct la altul iar mecanismul generator de traiectorie trebuie sa asigure realizarea unui spatiu de lucru mare. Sistemul de fabricatie in care exista un post de sudare prin presiune in puncte trebuie sa contina si un post de corectare (prin frezare) a formei geometrice a electrodului.
Repetabilitatea robotilor utilizati pentru sudare prin presiune in puncte este cuprinsa intre 0,5 1 mm.
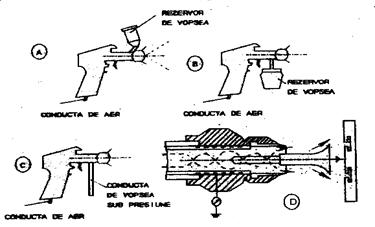
n Robotii industriali utilizati in operatii de acoperire a suprafetelor prin vopsire, manipuleaza scule de tip "pistol". Acestea contin o duza prin care realizeaza pulverizarea vopselei lichide sau imprastierea vopselei sub forma de pulbere. Pulverizarea se realizeaza fie sub actiunea unui jet de aer comprimat, fie sub presiunea care se exercita asupra suprafetei lichidului aflat intr-un rezervor din care se alimenteaza pistolul (procedeul "airless"). In acelasi rezervor se realizeaza la nevoie si preincalzirea vopselei.
Mai jos se prezinta diferiti roboti care manipuleaza scule:
Post de lucru robotizat pt.
debavura-rea chiulaselor de motor cu 6 cilindri Post de lucru robotizat pentru
sudarea prin puncte a unei usi de autocamion Instalatie de vopsire
robotizata pentru caroserii de autoturisme
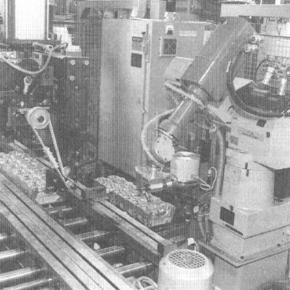

Pistoale de vopsire utilizate in
proce-se robotizate. Vopseaua patrunde prin: A - gravitatie, B -
ejectie, C - sub presiune, D - in forma de pulbere
electrostatica
Sistemul robotizat de vopsire trebuie sa contina un dispozitiv automat de curatire a pistolului, cu functionarea inclusa in ciclul de functionare al robotului. In cazul in care robotul trebuie sa vopseasca cu vopsele de diferite culori / calitati, el va fi prevazut cu un dispozitiv de schimbare automata a efectorului final, care va conlucra cu un depozit de scule (pistoale) amplasate in periferia robotului. Comanda robotilor de vopsire se face prin programe multipunct (MP) sau de traiectorie continua (CP).
In componenta sistemului de acoperire robotizata mai intra o instalatie aducatoare / de evacuare, cu miscarile dispozitivelor fata de care robotul isi sincronizeaza propriile miscari.
n Prelucrarea prin aschiere a unor obiecte cu ajutorul unor scule purtate de robot se utilizeaza in cazul obiectelor de dimensiuni mari, care nu pot fi montate in dispozitivele de lucru ale masinilor unelte. Senzori de forta - moment controleaza desfasurarea procesului de aschiere. Robotul trebuie sa aiba o exactitate de repetabilitate de 0,01 0,05 mm.
 Eficiente
tehnico-economice deosebite prezinta robotizarea proceselor de prelucrare
prin tehnologii neconventionale: cu fascicul laser sau cu jet de apa
de inalta presiune.
Eficiente
tehnico-economice deosebite prezinta robotizarea proceselor de prelucrare
prin tehnologii neconventionale: cu fascicul laser sau cu jet de apa
de inalta presiune.
Cu ajutorul fasciculului laser se pot efectua operatii de sudare, de taiere si de tratament termic superficial de precizie, cu influentarea minimala a structurii metalului din zona de prelucrat. Scula manipulata de robot este in acest caz un cap laser (Fig. 16), continand un sistem optic, care asigura concentrarea puterii fasciculului pe o suprafata mica a obiectului.
In figura de mai jos se prezinta principiul de functionare al robotului manipuland un "instrument de zero", in cadrul operatiei de masurare a unei caroserii de automobil.
Deseori, operatiile de control de calitate si inspectie se realizeaza cu ajutorul unor capete de lucru echipate cu senzori video (metode "ochi in mana"). Robotii utilizati in operatii de masurare, control de calitate, testare si inspectie, manipuleaza ca si scule capete de lucru, care realizeaza operatiile respective in diferite zone ale obiectului de lucru. Constructia capetelor de lucru in cauza este adecvata tipului de operatie de realizat.
 In
figura alaturata se prezinta un cap de inspectie cu senzori
video, purtat de robot pentru controlul calitatii suprafetei, pe
care un alt cap purtat de acelasi robot depune un strat de etansare
sub forma de fluid vascos (care se autolipeste).
In
figura alaturata se prezinta un cap de inspectie cu senzori
video, purtat de robot pentru controlul calitatii suprafetei, pe
care un alt cap purtat de acelasi robot depune un strat de etansare
sub forma de fluid vascos (care se autolipeste).
Comanda robotilor utilizati in operatii de masurare, control de calitate, testare si inspectie se realizeaza dupa programe "punct cu punct" (PTP) in cazul in care zonele de masurat / controlat / testat / inspectat sunt amplasate izolat sau pe "traiectorie continua" (CP) daca aceste zone prezinta o continuitate in lungul unei linii. Exactitatea de repetabilitate a robotilor utilizati in asemenea aplicatii trebuie sa fie corelata cu exactitatea masuratorilor care urmeaza a fi efectuate.
Conceperea si realizarea aplicatiilor industriale ale robotilor prezinta unele particularitati
1. robotii trebuie sa continue inlocuirea oamenilor in munci periculoase (de aceasta beneficiaza toti);
2. robotii trebuie sa continue inlocuirea oamenilor in munci pe care ei nu vor sa le execute (si de aceasta beneficiaza toti);
robotii ar trebui sa inlocuiasca oamenii in munci pe care le pot executa mai economicos (aceasta la inceput va dezavantaja pe unii, dar in final va fi in avantajul tuturor, ca si in cazul primelor doua legi).
Pentru succesul robotizarii sunt necesare urmatoarele conditii:
1. sa existe o necesitate clar perceputa;
2. sa fie disponibile tehnologii adecvate si practicieni competenti;
sa existe un suport financiar adecvat.
Activitatile de fabricatie s-au automatizat - robotizat atunci cand:
1. energia necesara sau mediul inconjurator depaseste posibilitatile de suportare ale operatorului uman;
2. priceperea necesara pentru a produce ceva util depaseste capacitatile operatorului uman;
cererea pentru produs este atat de mare incat exista o motivatie pentru cautarea unor modalitati de fabricatie mai bune.