|
|
|
|
Miniroboti - Proiectarea componentelor robotului cu deplasare prin balansare greutatii
1. Studiu preliminar
1.1. Caracteristicile generale ale robotului
Caracteristici conform temei de proiectare
- Lungimea maxima, lm: 210 mm;
- Latimea maxima, Lm: 80 mm;
- Inaltimea maxima, Hm: 90 m;m
- Toleranta, t: 105%;
- Unghiul de inclinare al robotului: 15o.
Schema de principiu a robotului
- a -
- b -
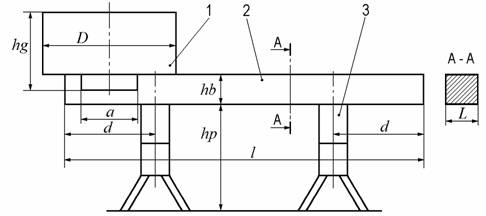
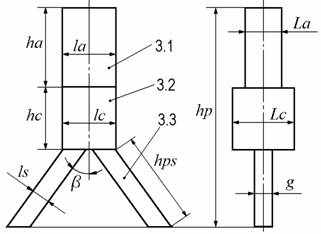
Fig 1.1. Schema de principiu a robotului: a - ansamblu; 1- greutate; 2- bara; 3- picioare;
b - piciorul robotului; 3.1.- articulatie; 3.- corp; 3.3- picior de sustinere.
Dimensiunile elementelor componente ale robotului:
Dimensiunile greutatii
- Diametrul: D = 75 mm;
- Lungimea talpii: a = 30 mm;
- Inaltimea: hg = 37 mm.
Dimensiunile barei
- Lungimea: l = 200 mm;
- Latimea: L = 18 mm;
- Distanta: d = 50 mm;
- Inaltimea: hb = 15 mm.
Dimensiunile piciorului
- Inaltimea piciorului teoretic:hpt = 51,7 mm;
- Inaltimea piciorului real: hp = 51,0 mm;
- Lungimea corpului: lc = 15 mm;
- Inaltimea corpului: hc = 17 mm;
- Latimea corpului:Lc = 17 mm;
- Inaltimea piciorului de sustinere: hps = 21 mm;
- Lungimea piciorului de sustinere:ls = 5 mm;
- Inclinarea unui picior de sustinere: β = 35o;
- Grosimea unui picior de sustinere: g = 5 mm;
- Lungimea articulatiei:la = 15 mm;
- Latimea articulatiei: La = 10 mm;
- Inaltimea articulatiei:ha = 22 mm.
Masele elementelor:
q Masele rezultate in cazul folosirii otelului ca material de constructie
- Masa barei: 439 grame
- Masa unui picior: 70 grame;
- Masa greutatii: 821 grame;
- Masa greutatii cu toleranta: 863 grame;
- Densitatea otelului: 7850 kg/m3.
q Masele rezultate in cazul folosirii aluminiului
- Masa barei: 151 grame
- Masa unui picior: 24 grame;
- Masa greutatii: 282 grame;
- Masa greutatii cu toleranta: 296 grame;
- Densitatea aluminiului: 2700 kg/m3.
Calculul puterilor
Date cu privire la viteze
- Viteza minima a robotului: 10,0 mm/s;
- Viteza maxima a robotului: 30,0 mm/s;
- Viteza de rotatie: ω = 10 grd/s;
- Unghiul maxim de rotatie: 60o.
Diferite date necesare calculului puterii
- Valoarea coeficientului acceleratiei gravitationale: g = 9,81 m/s2;
- Raza de angrenare: r = 10,00 mm;
- Procentaj pentru F > P: 125 %.
Rezultate cu privire la viteza de translatie a greutatii
- Viteza de deplasare: V = 75,3 mm/s;
- Timpul de deplasare tv = 2,7 s.
Puterea rezultata pentru Motorul 1
Cazul folosirii otelului
- Puterea: 0,80 W;
- Cuplul rezistent maxim: 105,7 mNm.
Cazul folosirii aluminiului
- Puterea: 0,27 W;
- Cuplul rezistent maxim: 36,4 mNm.
Puterea rezultata pentru Motorul 2
Cazul folosirii otelului
- Puterea: 0,16 W;
- Cuplul rezistent maxim: 934,1 mNm.
Cazul folosirii aluminiului
- Puterea: 0,12 W;
- Cuplul rezistent maxim: 709,6 mNm.
1.2 Determinarea vitezei de translatie a greutatii, in scopul alegerii corecte a motorului
Datele problemei
- Lungimea barei: 200 mm;
- Viteza minima a robotului: 10,0 mm/s;
- Viteza maxima a robotului: 30,0 mm/s;
- Viteza de rotatie: ω = 10 grd/s;
- Unghiul maxim de rotatie: 60o.
Verificarea calculului in raport cu tema de proiectare
- Timpul de translatie: t = 17,32 s;
- Viteza de miscare: Vt = 10 mm/s.
Observatie. Viteza de rotatie este limitata. Nu se poate obtine o viteza mai mare de 14,5 mm/s caci miscarea de rotatie este prea lenta. Trebuie aleasa o viteza de rotatie de 2,5 - 3,5 ori mai mare. Acest lucru va permite un control eficient asupra motorului pentru deplasarea greutatii.
Modul de lucru
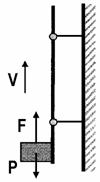
Mai intai se calculeaza valoarea cotei h (fig. 2):
![]() .
.
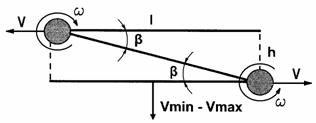
Fig 1. Determinarea vitezei de translatie a greutatii.
Apoi se calculeaza timpul t necesar efectuarii diferitelor miscari:
![]() , unde
, unde ![]() = 6 s.
= 6 s.
In continuare, tinand cont ca
![]()
se obtine
 ,
,
deci
 .
.
Rezultate
h = 173,2 mm;
tv = 2,7 s;
V = 75,3 mm/s.
1.3. Determinarea cuplului maxim al motorului 1, in scopul stabilirii puterii necesare
Cazul critic (fig. 1.3.)
— F >> P - pentru ca greutatea se deplaseaza;
— Puterea = F∙V & Puterea = C∙ω.
Fig 1.3.
Determinarea cuplului maxim al motorului.
Datele problemei
- Masa greutatii din otel: 862 g;
- Masa greutatii din aluminiu: 296,5 g;
- Viteza de deplasare: V = 75,3 mm/s;
- Valoarea coeficientului acceleratiei gravitationale: g = 9,81 m/s2;
- Raza de angrenare: r = 10,00 mm;
- Procentaj pentru F > P: 125 %.
Modul de lucru
Se alege o forta F >> P si apoi se calculeaza puterea necesara a motorului, astfel incat acesta sa faca fata cuplului rezistent:
![]() .
.
Rezultate
1.4. Determinarea cuplului maxim al motorului 2, in scopul stabilirii puterii necesare
Cazul critic (fig. 1.4.)
— C >> Cp - pentru ca greutatea se deplaseaza;
— Puterea = F∙V & Puterea = C∙ω.
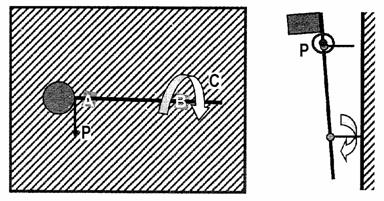
Fig 1.4. Determinarea cuplului maxim al motorului.
Datele problemei
- Masa greutatii din otel: 862 g;
- Masa greutatii din aluminiu: 296,5 g;
- Masa barei din otel: 438,7 g;
- Masa barei din aluminiu: 150,9 g;
- Masa unui picior din otel: 70,4 g;
- Masa unui picior din aluminiu: 24,2 g;
- Viteza de rotatie: ω = 0,2 rad/sec;
- Lungimea barei: l = 200 mm;
- Distanta: d = 50 mm;
- Latimea greutatii: a = 30 mm;
- Toleranta: tm = 110%;
- Valoarea coeficientului acceleratiei gravitationale: g = 9,81 m/s
Modul de lucru
Se determina cuplul C in punctul B; pentru aceasta se aplica principiul fundamental al staticii si se obtine:
C = masa barei∙(l - d)2 + masa greutatii∙(l - a) + masa piciorului∙(l - 2d)
Rezultate
in cazul folosirii otelului: P = 0,1623 W;
in cazul folosirii aluminiului: P = 0,124 W;
in cazul folosirii otelului: C = 934,082 mNm;
in cazul folosirii aluminiului: C = 709,567 mNm.
1.5. Corelatia dintre inaltimea h , distanta d si unghiul α
In tabelul urmator sunt prezentate corelatiile dintre inaltimea h (fig. 1.), distanta d (fig. 1.1.) si unghiul α (fig. 1.6.)
|
Lungimea l [mm] |
200 |
Unghiul α [grd] |
10 |
15 |
20 |
25 |
30 |
|
Distanta d1 [mm] |
40 |
Inaltimea h1 [mm] |
41,654 |
62,085 |
82,044 |
101,380 |
119,945 |
|
Distanta d2 [mm] |
50 |
Inaltimea h2 [mm] |
34,712 |
51,738 |
68,370 |
84,483 |
99,954 |
|
Distanta d3 [mm] |
66,7 |
Inaltimea h3 [mm] |
23,141 |
34,492 |
45,580 |
56,322 |
66,636 |
|
d ales = 50,0 mm |
|
α ales = 15o |
|
h ales = 51,7 mm |
1.6. Masa greutatii in cazul in care nu se tine cont de inclinarea grinzii
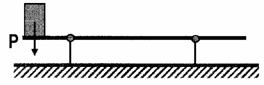
Fig 1.5. Determinarea masei greutatii in cazul in
care nu se tine cont
de inclinarea grinzii, α (vezi figura 1.6.).
|
Calculul greutatilor |
|
|
Masa unui picior din otel |
70,4 g |
|
Masa unei bare din otel |
438,7 g |
|
Masa unui picior din aluminiu |
24,2 g |
|
Masa unei bare din aluminiu |
150,9 g |
|
Distanta d |
50 mm |
|
Lungimea barei l |
200 mm |
|
Lungimea talpii a |
30 mm |
|
Toleranta t |
105% |
|
Masa greutatii din otel = 827,8 g |
|
Masa greutatii din aluminiu = 284,7 g |
|
Masa greutatii din otel cu toleranta= 869,2 g |
|
Masa greutatii din aluminiu cu toleranta = 298,9 g |
1.7. Masa greutatii in cazul in care se tine cont de inclinarea grinzii
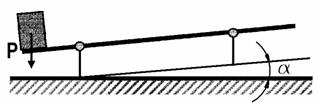
Fig 1.6. Determinarea masei greutatii in cazul in
care se tine cont
de inclinarea grinzii, α.
|
Calculul greutatilor |
|
|
Masa unui picior din otel |
70,4 g |
|
Masa unei bare din otel |
438,7 g |
|
Masa unui picior din aluminiu |
24,2 g |
|
Masa unei bare din aluminiu |
150,9 g |
|
Distanta d |
50 mm |
|
Lungimea barei l |
200 mm |
|
Lungimea talpii a |
30 mm |
|
Toleranta t |
105% |
|
Unghiul α |
15o |
|
Masa greutatii din otel = 820,9 g |
|
Masa greutatii din aluminiu = 282,4 g |
|
Masa greutatii din otel cu toleranta= 862,0 g |
|
Masa greutatii din aluminiu cu toleranta = 296,5 g |
Alegerea motoarelor
1. Aspecte generale
Inainte de alegerea motorului necesar, trebuie definite cu exactitate caracteristicile tehnice care ii sunt impuse:
La ce viteza si cu ce cuplu va functiona?
Care vor fi duratele fiecarei faze de solicitare?
Care sunt valorile acceleratiilor?
Care este marimea momentelor de inertie?
In majoritatea cazurilor, tractiunea este indirecta, caci energia furnizata de motor sufera o transformare mecanica prin intermediul curelelor de transmisie, angrenajelor, suruburilor fara sfarsit etc. In consecinta, valorile tractiunii trebuie transformate la nivelul arborelui motorului.
De asemenea, trebuie definite conditiile de alimentare.
Care va fi tensiunea maxima ce va putea fi utilizata?
Care sunt limitele intensitatii curentului?
In cazul folosirii acumulatoarelor sau celulelor solare, atat tensiunea cat si intensitatea sunt supuse unor limitari foarte stricte. Daca alimentarea se face prin intermediul unui servoamplificator, intensitatea maxima va fi limitata de acesta.
Alegerea unui reductor
Este necesar sa se respecte limitele in ceea ce priveste viteza si cuplul. Cuplul motor trebuie sa fie mai mare decat cuplul nominal (cuplul permanent maxim) al reductorului:
CN,G > CB.
In cazul unei supraincarcari de scurta durata, se poate avea in vedere cuplul intermitent maxim. Cuplul permanent al reductorului depinde de numarul treptelor reductorului.
Nu trebui depasita turatia de intrare Nmax,G. Astfel, pentru o turatie data, raportul de reducere maxim posibil imax este limitat. Pentru alegerea raportului de reducere i se aplica formula:
 .
.
In continuare se alege reductorul corespunzator si se trece la etapa urmatoare, calculul rapoartelor de transmitere.
Turatia si cuplul care caracterizeaza arborele motorului (Nmot, Cmot) se transforma prin intermediul reductorului (NB, CB), in conformitate cu relatiile:
![]() ;
;
 .
.
In continuare, ne vom referi la valorile calculate pentru alegerea motorului (Nmot, Cmot).
Alegerea motorului
Alegerea tipului de motor se efectueaza in functie de cuplul necesar. Pe de o parte trebuie sa se tina cont de cuplul maxim necesar CMax, si pe de alta parte se considera cuplul efectiv CRMS.
Functionarea in regim se caracterizeaza printr-un punct unic de functionare (CB, NB). Tipurile de motoare trebuie sa aiba un cuplu nominal CN (cuplu permanent maxim) care trebuie sa fie mai mare decat cuplul de functionare CB:
CN > CB .
Avand in vedere ca ciclurile de lucru sunt caracterizate prin porniri si opriri repetate, cuplul nominal al motorului trebuie sa fie mai mare decat cuplul rezistent. Aceasta permite evitarea supraincalzirii motorului:
CN > CRMS .
In cea mai mare parte a cazurilor cuplul de pornire CH se alege superior cuplului necesar maxim:
CH > CMax .
Calculul motoarelor
1. Motorul care realizeaza translatia greutatii (motorul 1)
Asa dupa cum s-a vazut in cele ce preced, pentru alegerea motorului si a componentelor cu care este conectat, vom raspunde la urmatoarele intrebari:
Care va fi turatia si cuplul necesar in timpul deplasarii?
NB = 72 rot/min;
CB = 179 mNm.
Care va fi durata fiecarei faze de solicitare?
tfaza 1 = 0,6 s
tfaza 2 = 1,5 s
tfaza 3 = 0,6 s
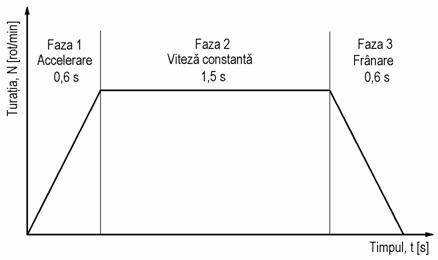
Fig 1. Variatia turatiei in functie de timp, pentru motorul 1.
In continuare, trebuie definite conditiile de alimentare.
Care este tensiunea maxima care va fi la dispozitia motorului?
Vcc = 12 V.
Care sunt limitele intensitatii curentului?
I ![]() [550 mA; 2 A].
[550 mA; 2 A].
Reductorul motorului 1
Cuplul motor trebuie sa se situeze deasupra cuplului nominal C (cuplul permanent maxim) al reductorului:
CN,G > CB.
Aceasta conditie este indeplinita:
|
CN,G = 200 mNm > CB = 179 mNm |
Pentru alegerea raportului de reducere i se aplica formula:
,
in care
Nmax,G = 8000 rot/min si NG = 72 rot/min,
de unde
imax = 110.
Se alege:
|
i = 67 |
Motorul 1
Conversia turatiei si cuplului realizata de reductor (NB, CB), asupra arborelui motorului (Nmot, Cmot) se supune urmatoarelor legi:
![]() ;
;
.
Deci,
pentru ![]() = 0,75 se obtine:
= 0,75 se obtine:
|
Nmot = 4824 rot/min |
|
Cmot = 3,6 mNm |
|
Pmot = 8 W |
Motorul care realizeaza rotatia picioarelor (motorul 2)
Asa dupa cum s-a vazut in cele ce preced, pentru alegerea motorului si a componentelor cu care este conectat, vom raspunde la urmatoarele intrebari:
Care va fi turatia si cuplul necesar in timpul deplasarii?
NB = 1,6 rot/min;
CB = 2400 mNm.
Care va fi durata fiecarei faze de solicitare?
tfaza 1 = 1 s
tfaza 2 = 4 s
tfaza 3 = 1 s
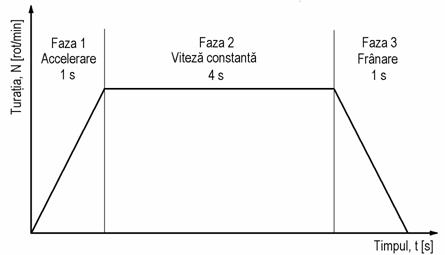
Fig Variatia turatiei in functie de timp, pentru motorul
In continuare, trebuie definite conditiile de alimentare.
Care este tensiunea maxima care va fi la dispozitia motorului?
Vcc = 12 V.
Care sunt limitele intensitatii curentului?
I
![]() [550 mA; 2 A].
[550 mA; 2 A].
Reductorul motorului 2
Cuplul motor trebuie sa se situeze deasupra cuplului nominal C (cuplul permanent maxim) al reductorului:
CN,G > CB.
Aceasta conditie este indeplinita:
|
CN,G = 4,5 mNm > CB = 2,4 mNm |
Pentru alegerea raportului de reducere i se aplica formula:
,
in care
Nmax,G = 6000 rot/min si NG = 1,62 rot/min,
de unde
imax = 3700.
Se alege:
|
i = 2189 |
Motorul 2
Conversia turatiei si cuplului realizata de reductor (NB, CB), asupra arborelui motorului (Nmot, Cmot) se supune urmatoarelor legi:
![]() ;
;
.
Deci,
pentru ![]() = 0,75 se obtine:
= 0,75 se obtine:
|
Nmot = 3721 rot/min |
|
Cmot = 22 mNm |
|
Pmot = 8 W |