|
|
|
|
Calculul de tractiune al UST
Autoscreperul de tipul (4x4) este un utilaj reprezentativ pentru sapat si transportat, cu un regim de tractiune mult mai mare decat regimul de transport, care in general este echipat cu doua motoare, cu caracteristici functionale si parametrii energetici foarte apropiati, unul apartinand autosasiului monoax, iar celalalt puntii motoare din spate. Transmisiile mecanice ale celor doua punti (fata si spate) sunt identice. Intr-o serie de cazuri autoscreperul de tipul (4x4) nu lucreaza cu impingator. Cand lucreaza cu impingator, aceste masini sunt utilizate pentru saparea solurilor tari in vederea cresterii productivitatii.
Calculul de tractiune are in vedere determinarea parametrilor principali ai autoscreperului (volumul geometric al cupei, greutatea proprie a screperului, puterea totala a motoarelor, viteza maxima de transport, viteza minima pe treapta de lucru, numarul de turatii corespunzatoare acestor viteze si rapoartele de transmitere) si ale impingatorului (puterea maxima de tractiune si viteza de deplasare pe treapta de lucru in agregat cu autoscreperul).
Pentru efectuarea calculului de tractiune la acest tip de autoscreper se considera data capacitatea cupei screperului. Greutatea pamantului din cupa se calculeaza cu relatia:
Iar greutatea proprie a autoscreperului cu relatia:
![]()
Greutatea totala a screperului va fi:
In general, greutatea totala a autoscreperului se repartizeaza pe punti in mod egal
![]()
Forta maxima de tractiune a autosasiului impingator se determina in mod analog cazului autoscreperului (4x2).
Determinarea raportului de transmitere pe prima treapta de lucru i1 a impingatorului, se efectueaza dupa cum urmeaza:
a) se construieste caracteristica de tractiune a impingatorului utilizand metode cunoscute.
Pe axa ordonatelor se
masoara la scara respectiva valoarea cea mai mare admisa a
coeficientului de patinare stabilita pentru autovehicule senilate (![]() ).
).
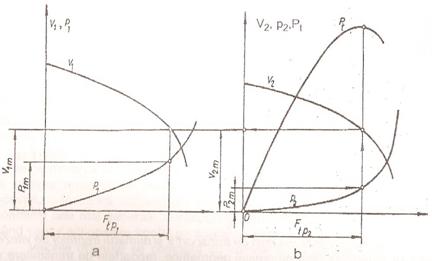
Figura 1
b) procedand analog cazului autoscreperului de tipul (4x2) se gaseste valoarea fortei de tractiune a impingatorului Ftp2 si corespunzator, viteza reala de deplasare in timpul lucrului v2m. Se construieste caracteristica de tractiune a autoscreperului de tipul (4x4) utilizand relatia pentru patinarea rotilor
![]() [km/h]
[km/h]
in care: n - turatia autosasiului impingator, care corespunde regimului analizat;
rm - raza dinamica a rotii motoare stelate;
i1 - raportul de transmitere al primei trepte de lucru.
Curba coeficientului de patinare a autoscreperului se construieste cu formula:
La trasarea curbei coeficientului de patinare a autoscreperului p1, s-a considerat acelasi coeficient de aderenta la ambele punti. Valoarea cea mai mare pentru coeficientul de patinare a autoscreperului este p1m=30% si ii corespunde forta de tractiune Ftp1 si corespunzator viteza de lucru V1m.
c) Determinarea puterii totale a motoarelor presupunand ca ele lucreaza pe caracteristica de regulator si aproape de puterea maxima utilizand relatia:
 [kW]
[kW]
in care: Ftsmax - forta de tractiune corespunzatoare regimului de patinare maxim admisibil, in daN
fs - coeficientul de rezistenta la rulare a autosasiului monoax
V1 - viteza reala de deplasare a intregului convoi, km/h
![]() - randamentul
transmisiei mecanice a autoscreperului
- randamentul
transmisiei mecanice a autoscreperului
Momentul maxim se determina din conditia de aderenta, cu relatia:
![]()
Dupa alegerea motoarelor este necesara o verificare a incarcarii lor:
![]()
Daca conditia este indeplinita, atunci puterea motoarelor este aleasa corect, in caz contrar vor fi alese motoare de putere mai mare.
d) Cunoscand motorul si caracteristica sa de regulator se afla numarul de turatii ale arborelui cotit np cand acesta dezvolta puterea Pmax.
e) Se determina raportul de transmitere pe prima treapta pentru ambele punti, respectiv vitezele minime de calcul cu relatii de forma:
f) Se alege viteza maxima de transport V si numarul treptelor de viteze, apoi se determina ratia progresiei geometrice, rapoartele de transmitere si vitezele corespunzatoare lor.
Pentru aprecierea calitatilor de tractiune si de trecere a convoiului (autoscreper - impingator) se construiesc analog cazului precedent, caracteristicile de tractiune si de viteza ale acestuia. Ambele punti sunt echipate cu acelasi tip de transmisie, in vederea unei bune adaptabilitati cinematice si dinamice. Pentru a simplifica calculul cel mai adesea se considera aceiasi coeficienti de aderenta la ambele punti.
Caracteristicile de tractiune si de viteza ale UST se pot construi utilizand metode grafice, grafo analitice si analitice, fiecare metoda putand fi utilizata in functie de precizia de calcul care se doreste a se obtine. Dintre aceste metode, metoda analitica este cea mai precisa.