|
|
|
|
APLICATII TEHNICE ALE MECANISMELOR CU PARGHII
1. Introducere
Mecanismele cu parghii au o larga utilizare in tehnica ca mecanisme de multiplicare si transformare a miscarii, mecanisme de ghidare si inregistratoare, mecanisme de reglaj sau pentru realizarea unor operatii matematice, mecanisme de putere si comanda sau mecanismele de actionare si comanda din constructia aparatelor electrice etc. [20],[21],[23].
Mecanismele amplificatoare si mecanismele pentru transformarea miscarii se utilizeaza in constructia de aparate pentru transmiterea si transformarea unor semnale, avand in majoritatea cazurilor, o caracteristica liniara. Ele sunt formate din mecanisme cu parghii, realizate cu anumite particularitati constructive, des folosite fiind: mecanismele cu sinus, de tangenta, mecanismul patrulater, biela-manivela si mecanismul cu culisa oscilanta.
 Mecanismul
de sinus (fig. 1.54) se poate utiliza ca amplificator, dar poate fi utilizat
si pentru transformarea miscarii de rotatie in miscare
de translatie. Atunci cand este utilizat pentru transformarea
miscarii de translatie in miscare de rotatie,
mecanismul poarta denumirea de mecanism arcsinus.
Mecanismul
de sinus (fig. 1.54) se poate utiliza ca amplificator, dar poate fi utilizat
si pentru transformarea miscarii de rotatie in miscare
de translatie. Atunci cand este utilizat pentru transformarea
miscarii de translatie in miscare de rotatie,
mecanismul poarta denumirea de mecanism arcsinus.
Mecanismul cu culisa oscilanta, avand diverse forme constructive (fig. 1.55) se utilizeaza in constructia de aparate in care miscarea se transmite intre sisteme de rotatie cu axe paralele (mecanisme plane) sau intre sisteme de rotatie cu axe perpendiculare (mecanisme spatiale).
Caracteristica semnalului propagat prin acest mecanism se poate liniariza sau, daca se urmareste marirea domeniului scarii aparatului, se lasa neliniara.
Din geometria mecanismului (fig. 1.56) se obtine:
![]() . (1.169)
. (1.169)
Pentru valori mici ale unghiului ![]() rezulta legea
teoretica de propagare a fluxului de semnale, si anume:
rezulta legea
teoretica de propagare a fluxului de semnale, si anume:
![]() . (1.170)
. (1.170)
Dezvoltand in serie expresia (1.155) se obtine:
Fig.1.55
Fig.156
 , (1.171)
, (1.171)
unde ![]() , parametrul
, parametrul ![]() rezultand din
relatia
rezultand din
relatia ![]() (
(![]() are valoarea
are valoarea ![]() pentru
pentru ![]() ).
).
Cunoscutul
mecanism biela-manivela, se utilizeaza in constructia de
aparate pentru transformarea miscarii si amplificarea acesteia
cu un raport de transmitere constant. Mecanismul trebuie sa realizeze o
caracteristica liniara intre marimea semnalului de intrare ![]() si a semnalului
de iesire
si a semnalului
de iesire ![]() .
.
Un grup aparte de mecanisme cu parghii il constituie mecanismele de ghidare si inregistratoare, iar o categorie speciala de mecanisme sunt mecanismele de actionare si comanda din structura aparatelor electrice.
2. Mecanisme de ghidare si inregistratoare
O particularitate constructiva a acestor mecanisme este aceea ca unul din punctele elementului condus descrie o curba de biela ce reproduce cu o aproximatie admisa o alta curba, data anterior.
La aceste mecanisme, forma dorita a traiectoriei punctului nu se realizeaza prin ghidaje speciale, cum ar fi de exemplu, rectiliniaritatea miscarii patinei la mecanismul biela-manivela, ci prin alegerea corespunzatoare a relatiilor dintre lungimile elementelor mecanismului.
Mecanismele de ghidare sunt folosite la aparate de masurat, la dispozitive automate de control etc., si au rolul de a reproduce fie o miscare rectilinie, fie o miscare circulara.
Aceste mecanisme de
ghidare (fig. 1.57) sunt mecanisme de ghidare precisa. Mecanismul din fig.
1.57a permite punctului M sa
descrie o traiectorie ![]() , ce este o dreapta iar mecanismul din fig. 1.57b
descrie o traiectorie in arc de cerc.
, ce este o dreapta iar mecanismul din fig. 1.57b
descrie o traiectorie in arc de cerc.
a) b)
Fig.1.57
In practica sunt si mecanisme de ghidare aproximativa.
In fig. 1.58 sunt prezentate doua mecanisme ce realizeaza o ghidare aproximativa.
a) b)
Fig.1.58
Astfel mecanismul din
fig. 1.58a este utilizat in cinematografie pentru avansul intermitent al
peliculei de film. Punctul M al
mecanismului descrie pe portiunea de antrenare a peliculei de film o
traiectorie ![]() , care este aproximativ o dreapta.
, care este aproximativ o dreapta.
La mecanismul din fig.
1.58b traiectoria ![]() a punctului M se poate aproxima pe o anumita
portiune cu arcul de cerc
a punctului M se poate aproxima pe o anumita
portiune cu arcul de cerc ![]() . Deoarece punctul E
este situat in centrul acestui arc de cerc, la deplasarea punctului M pe aceasta portiune a
traiectoriei
. Deoarece punctul E
este situat in centrul acestui arc de cerc, la deplasarea punctului M pe aceasta portiune a
traiectoriei ![]() , punctul E este
fix. S-a obtinut mecanismul intermitent la care, pentru fiecare
rotatie a elementului AB,
elementul EF se va gasi in
miscare sau in repaus.
, punctul E este
fix. S-a obtinut mecanismul intermitent la care, pentru fiecare
rotatie a elementului AB,
elementul EF se va gasi in
miscare sau in repaus.
La mecanismele inregistratoare trebuie sa se aiba in vedere ca, prin alegerea dimensiunilor elementelor componente, sa fie indeplinite unele conditii si anume: traiectoria punctului M sa fie o dreapta; semnalul propagat prin mecanism sa aiba o caracteristica liniara; sa fie asigurata functionarea simetrica a mecanismului, in raport cu pozitia "zero" a acestuia, pentru valori egale si de semn contrar a semnalelor de intrare; sa aiba gabarit minim, greutate si moment de inertie mici; pierderile prin frecare sa fie minime si precizia functionala sa fie ridicata.
Detalii cu privire la
cele mai uzuale mecanisme cu parghii utilizate la mecanismele inregistratoare
sau indicatoare sunt prezentate in literatura de specialitate.![]() ;
;![]() .
.
3. Scheme cinematice ale mecanismelor de actionare si comanda
ale aparatelor electrice
In general, rolul mecanismelor aparatelor electrice este de a inchide si deschide circuite electrice.
Aparatele electrice pot fi de joasa tensiune, medie si inalta tensiune.
Printre aparatele de joasa tensiune, aspecte mecanice importante prezinta mecanismele din constructia intrerupatoarelor, a sigurantelor, releelor si contactoarelor. [70].
Aparatele electrice de medie si inalta tensiune care pun importante probleme mecanice la proiectarea mecanismelor sunt: separatoarele, intrerupatoarele si dispozitivele de actionare. Deoarece inchiderea sau deschiderea unui circuit electric aste legata de posibilitatea aparitiei unui arc electric, rezulta o conditie fundamentala ce se cere la proiectarea acestor aparate si anume, este necesar ca ansamblul contactului mobil sa posede o asemenea viteza in momentul propice aparitiei arcului electric, incat trecerea prin zona de formare a arcului sa se faca intr-un timp mai scurt ca cel necesar aparitiei arcului. Aceasta inseamna ca mecanismele de actionare trebuie sa asigure o viteza foarte ridicata pentru elementul final condus, la un anumit moment al ciclului.
In functie de o serie de prescriptii cu caracter electrotehnic, legate mai ales de succesiunea rapida a unor cicluri de inchidere si deschidere a aparatelor electrice (pentru a se evita intreruperea alimentarii unor linii de inalta tensiune la aparitia unor scurtcircuite accidentale),duratele complete ale ciclurilor sunt de asemenea foarte scurte, ceea ce presupune viteze mari ale elementelor mecanismelor.
Asadar, mecanismele aparatelor electrice trebuie sa functioneze, in general cu viteze foarte mari. Trecerea de la o stare de repaus la o stare de miscare cu viteze mari si oprirea brusca a miscarii, presupun aparitia unor acceleratii foarte mari, a unor forte de inertie de asemenea mari si impun folosirea unor dispozitive de amortizare.
Actionarea mecanismelor aparatelor electrice se face cu mecanisme motoare ce asigura viteze foarte mari: resorturi, fluide sub presiune, electromagneti etc.
Multe aparate electrice lucreaza in celule prefabricate sau in camere special construite. Din aceasta cauza este necesar sa se asigure gabarite mici ale mecanismelor, ceea ce presupune gasirea unor traiectorii optime ale punctelor contactelor mobile.
In constructia aparatelor electrice este frecvent folosita pozitia "punctului mort" pentru blocarea mecanismului. Aceasta pozitie se intalneste mai ales la mecanismele de libera deschidere. Aceste mecanisme trebuie sa permita comandarea ciclului de deschidere in orice moment, indiferent in ce faza a functionarii se afla aparatul respectiv (din motive de protectia muncii).
Din punct de vedere structural, mecanismele aparatelor electrice prezinta o serie de particularitati datorate prezentei resorturilor si amortizoarelor precum si functionarii diferite la inchidere si la deschidere.
In fig. 1.59 este
prezentat un releu termic. La trecerea unui curent mai mare decat cel stabilit,
rezistenta 8 se
incalzeste, bimetalul 7 se
deformeaza deplasandu-se spre stanga, iar elementul 1, sub actiunea arcului 9
se roteste in sensul lui ![]() . Miscarea se transmite la elementul 3 care se va roti in sensul lui
. Miscarea se transmite la elementul 3 care se va roti in sensul lui ![]() , intrerupand circuitul prin deschiderea contactului din E (arcul 6 se alungeste).
, intrerupand circuitul prin deschiderea contactului din E (arcul 6 se alungeste).
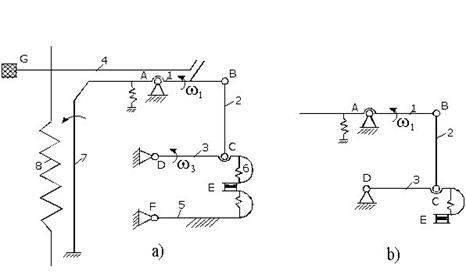
Fig.1.59
Reanclansarea se face prin apasarea manuala a butonului G.
Din punct de vedere cinematic intereseaza numai elementele 1; 2 si 3; in fig. 1.59b este reprezentata schema cinematica rezultata si anume, un mecanism paralelogram articulat.
In figura 1.60 este
reprezentata schema cinematica a ansamblului intrerupator-separator.
Manivela motoare 1, prin intermediul
bielei 2 transmite miscarea la
balansierul 3, iar prin intermediul
bielei 6 la balansierul 7. De la balansierul 3, respectiv 7, miscarea ajunge la contactele mobile 5, respectiv 9, prin
intermediul bielelor 4, respectiv 8. Cand manivela 1 se roteste in sensul lui ![]() se produce inchiderea,
iar la miscarea in sens invers lui
se produce inchiderea,
iar la miscarea in sens invers lui ![]() se produce
deschiderea.
se produce
deschiderea.
In fig. 1.61 se da mecanismul unui contactor electromagnetic. Prin conectarea la retea, electromagnetul atrage armatura 1, care, pentru pozitia de inchidere, se afla in prelungirea bielei BC, astfel ca mecanismul se afla in pozitia de punct mort. La intreruperea alimentarii, arcul 5 scoate mecanismul din punctul mort, elementele revenind la pozitia initiala.
Pentru mecanismul de actionare al unui intrerupator de inalta tensiune (fig. 1.62), resorturile EL si K nu se considera elemente iar cuplele E, L si K nu se iau in considerare astfel ca mecanismul se descompune in elementul conducator AB, diada de aspectul 1, BCD si diada de aspectul 2, FGH. In constructia aparatului, forta P actioneaza pentru deschiderea intrerupatorului, resortul EL este tensionat la deschidere si se destinde la cursa de inchidere, iar resortul K are rol de amortizor.
Fig.1.60
Fig.1.61
Fig.1.62
Fig.1.63
In mod analog, resortul si amortizorul din fig. 1.63 nu se considera elemente pentru mecanismul de intrerupator respectiv ci doar forte exterioare, luate in considerare la studiul cinetostatic si dinamic.
4. Mecanisme cu parghii utilizate in transmiterea unui flux de
putere
In majoritatea cazurilor, in mecanica fina se transmite un flux de semnale, dar nu rareori, pe langa semnalul propagat este necesar sa se transmita si un flux de putere. In aceasta situatie se pot folosi mecanismele cu parghii, tinandu-se seama de precizia transmiterii si receptionarii semnalului, de randamentul si solicitarile existente in elemente si cuple. O grupa a acestor mecanisme cu parghii o formeaza variatoarele de turatie sau transmisiile cu impulsuri. Acestea permit un reglaj continuu al vitezei unghiulare a sistemului de antrenare, existand posibilitatea trecerii prin zero a vitezei unghiulare a elementului de iesire, pentru o viteza diferita de zero a elementului de antrenare. [23].
Transmisiile cu
impulsuri au la baza mecanismele la care rotatiei uniforme a
elementului conducator ii corespunde o rotatie neuniforma a
elementului condus. De exemplu, la o rotatiei cu ![]() si
si ![]() (fig. 1.64a).
Daca legatura intre balansierul 3
si arborele condus II se
realizeaza prin intermediul unui cuplaj de sens unic 4 (fig. 1.64b), elementul condus
II va avea o miscare discontinua (fig. 1.65a). Daca
mecanismul este format din doua sau mai multe mecanisme patrulatere
identice, ale caror manivele sunt defazate unghiular, miscarea
arborelui II este variabila
(fig. 1.65b, curba II daca se
utilizeaza doua mecanisme patrulatere), sau tinde catre o
valoare constanta
(fig. 1.64a).
Daca legatura intre balansierul 3
si arborele condus II se
realizeaza prin intermediul unui cuplaj de sens unic 4 (fig. 1.64b), elementul condus
II va avea o miscare discontinua (fig. 1.65a). Daca
mecanismul este format din doua sau mai multe mecanisme patrulatere
identice, ale caror manivele sunt defazate unghiular, miscarea
arborelui II este variabila
(fig. 1.65b, curba II daca se
utilizeaza doua mecanisme patrulatere), sau tinde catre o
valoare constanta ![]() pentru n asemenea mecanisme. Inertia
arborelui II si a mecanismelor
aferente modifica variatia vitezei
pentru n asemenea mecanisme. Inertia
arborelui II si a mecanismelor
aferente modifica variatia vitezei ![]() dupa curba III (reducandu-se neuniformitatea de
miscare). La utilizarea unui numar mai mare de mecanisme patrulatere,
gradul de neuniformitate al miscarii elementului poate fi redus la 1
- 2% (fig. 1.65c).
dupa curba III (reducandu-se neuniformitatea de
miscare). La utilizarea unui numar mai mare de mecanisme patrulatere,
gradul de neuniformitate al miscarii elementului poate fi redus la 1
- 2% (fig. 1.65c).
 In situatia cand
mecanismele patrulatere sunt cu doua manivele, viteza unghiulara
In situatia cand
mecanismele patrulatere sunt cu doua manivele, viteza unghiulara ![]() , iar atunci cand mecanismele patrulatere sunt cu manivele
si balansiere, viteza unghiulara
, iar atunci cand mecanismele patrulatere sunt cu manivele
si balansiere, viteza unghiulara ![]() . Prin urmare, este posibil ca prin modificarea
convenabila a dimensiunilor patrulaterelor sa se modifice viteza
unghiulara
. Prin urmare, este posibil ca prin modificarea
convenabila a dimensiunilor patrulaterelor sa se modifice viteza
unghiulara ![]() si
si ![]()
![]() .
.
In fig. 1.66a si1.66b sunt prezentate diferite solutii constructive care realizeaza modificarea acestor dimensiuni.
Astfel, mecanismul din
fig. 1.66a ce utilizeaza trei asemenea mecanisme cu manivele defazate la
1200, permite variatia vitezei unghiulare la arborele condus ![]() , prin schimbarea pozitiei centrului de oscilatie A, adica al suportului 1, ce se deplaseaza in
directia x. Acest variator
asigura transmiterea unor puteri de ordinul sutelor de wati (
, prin schimbarea pozitiei centrului de oscilatie A, adica al suportului 1, ce se deplaseaza in
directia x. Acest variator
asigura transmiterea unor puteri de ordinul sutelor de wati (![]()
![]() ,
, ![]() ,
, ![]() ).
).
Fig.1.66
La variatorul din fig. 1.66b, rotatia continua a manivelei 1 (excentrica pe arborele conducator) a mecanismului patrulater 1-3-4 (punctul A este fix) se transmite balansierului 6 si, prin cuplajul de sens unic C, arborelui condus II. Pentru variatia turatiei arborelui condus II, se modifica pozitia punctului de balansare a elementului 4 (A); aceasta variatie se realizeaza cu ajutorul parghiei 7, care se poate roti fata de punctul B. Parghiile variatorului sunt realizate din tabla stantata. Acest variator utilizeaza patru mecanisme montate in paralel.
Ca exemplu pentru puterea
unui variator de 120.500W, turatia la intrare este ![]() , iar turatia la iesire este
, iar turatia la iesire este ![]() .
.