|
|
|
|
Studiul unui sistem de pozitionare cu cuple cinematice clasice si actionare electrica
Mecanism surub piulita
Universitatea Tehnica din Cluj - Napoca
Facultatea de Electronica, Telecomunicatii si Tehnologia
Informatiei
Cuprins
1. Introducere
2.1 Structura geometrica a sistemului mecanic in functie de
spatiul de lucru.
2.2 Structura mecanica a modelului experimental propus
3 Comanda unui modul de actionare
4. Concluzii
5. Bibliografie
1 Introducere
In lucrare, autorul abordeaza aspecte legate de conceptia, constructia si functionarea structurii mecanice si de actionare a unui robot antropomorf cu 4 grade de libertate + mecanism de prehensiune.
Se cunosc astazi, o mare varietate de roboti antropomorfi, la care structura mecanica a bratului purtator utilizeaza diverse solutii constructive in functie de domeniul de aplicare.
Varianta prezentata in lucrare face parte din categoria variantelor simple cu actionare pe fiecare cupla cinematica, prin intermedul motoarelor de curent continuu si a reductoarelor melc-roata melcata cu jocuri de flanc zero.
Acest sistem reprezinta o solutie comoda atat in privinta erorii de pozitionare dar si in comanda prin sisteme cu microprocesor.
2.1 Structura geometrica a sistemului mecanic in functie de spatiul de lucru.
Incazul general, deplasarea unui obiect dintr-o pozitie in alta, in spatiul tridimensional, se poate realiza prin sase miscari de rotatie independente intre ele, asa cum permite mana operatorului uman daca operatiile ar fi facute de acesta. (Figura 1.)
Figura. 1.
![]()
Figura 2.
![]()
Prin compunerea unor miscari de rotatie mana operatorului uman realizeaza miscari de translatie ale bratului, (figura 2). Intrucat miscarea de translatie este o rotatie la limita, miscarea generala spatiala a unui corp (obiect) se poate realiza prin combinatii de rotatii R si translatii T.
Pentru construirea unui robot industrial in scopul realizarii unei anumite probleme de manipulare este hotarator spatiul de lucru al efectorului, respectiv zona de miscare a mecanismului de prehensiune.
Configuratia si marimea acestor spatii de lucru, depind de structura mecanismului de pozitionare, de felul cuplelor cinematice, precum si de dimensiunile elementelor cinematice.
Astfel, cu ajutorul unui lant cinematic deschis, cu patru elemente se pot proiecta opt mecanisme de manipulare cu spatii de lucru de configuratie diferita, daca se folosesc numai
cuple de rotatie R si translatie T care permit o singura miscare.
Aceste variante de mecanisme se deosebesc prin numarul si ordinea cuplelor de translatie si rotatie folosite pentru legarea celorpatru elemente cinematice, precum si prin pozitia relativa a axelor acestor cuple cinematice. In tabelul 1 prezentam citeva variante de structuri mecanice cu patru elemente cinematice.
Tabelul 1
Nr. cuple cinem. de
translatie
3
2
1
0
Nr. cuple cinem. de
rotatie
0
1
2
3
Variante lanturi
cinematice
T T T
RTT
TRT
TTR
RRT
RTR
TRR
RRR
Nr. variantei
1
2
3
4
5
6
7
8
Spatiu de lucru
Prismatic
Cilindric
Sferic
Toroidal
2.2 Structura mecanica a modelului experimental propus
In vederea realizarii unei celule de fabricatie robotizate de uz didactic in care un subsistem de manipulare sa deserveasca un subsistem de prelucrare, autorii au conceput modelul experimental al unui robot articulat.Acest robot a fost conceput conform schemei cinematice structurale din figura 3, cu 4 grade de libertate + mecanism de prehensiune.
 Mecanismul de
pozitionare al robotului poseda trei grade
de libertate
are lantul
cinematic
principal de tip RRR cucoloana pivotanta, brat si antebrat, iar spatiul de lucru toroidal.
Conform lucrarii 1] acest tip
de
Mecanismul de
pozitionare al robotului poseda trei grade
de libertate
are lantul
cinematic
principal de tip RRR cucoloana pivotanta, brat si antebrat, iar spatiul de lucru toroidal.
Conform lucrarii 1] acest tip
de
mecanism de pozitionare al robotului poarta
denumirea de brat purtator poliarticulat saubrat antropomorf. Coloana pivotanta are o miscare de rotatie in jurul axei Oz constituind modulul de baza al robotului, iar articulatile bratului si antebratului au miscari de rotatie in jurul axei Ox constituind modulul bratului, respectiv antebratului.
Modulul de baza al coloanei pivotante
1 este actionat prin intermediul unui reductor melcat avand roata melcata situata intr-un plan orizontal (figura 4 . Melcul reductorului,
Figura 3.
din constructie a fost amlasat direct pe axul
motorului constituind ansamblul motoreductor de tip EP 401 12Vcc cu un raport de transmitere i = 38.
Modulul bratului 2 este actionat prin intermediul unui motoreductor de tip EP-401-
 12Vcc si a unui reductor melcat cu raportul de transmitere i = 126 astfel
incat sa se asigure rotirea intre
12Vcc si a unui reductor melcat cu raportul de transmitere i = 126 astfel
incat sa se asigure rotirea intre
2 min si
2 max de
Figura 4.
intermediul unei cuple de
Figura 5.
40 o in 13 secunde
(figura 5).
Modulul antebratului 3 a fost actionat de la baza elementului 2 al bratului (figura 3) prin translatierealizatacu
ajutorul unui mecanism surub- piulita cu pas de 1,5 mm/rotatie. Mecanismulsurub-piulita, de constructie cu eliminarea jocului de flanc a fost utilizat pentru ca se pot transmite forte si momente mari, functioneaza linistit si fara zgomot si realizeaza miscari de translatie de precizie ridicata.
Mecanismul surub-piulita (figura 3 , a fost actionat prin intermediul unui
 o
o
motoreductor de tip EP 401 12Vcc. Se asigura astfel, rotirea intre 3 min
 in 55 secunde.
in 55 secunde.
si 3 max
de 130
Figura 6.
Mecanismul de orientareeste de tip activ, cu un singur grad de libertate si are axa perpendiculara pe ultimele doua axe ale articulatiilor bratului purtator poliarticulat. Mecanismul de orientare (figura 3), a fost actionat prin intermediul unui motoreductor de tip EP-401 12Vcc cu un raport de transmitere i = 38 identic cu cel din figura 4).
Figura 7.
Pe bratul activ al mecanismului de orientare se gaseste montat mecanismul de prehensiune cu doua degete si strangere simetrica. Degetele se deplaseaza prin miscare de rotatie in jurul cuplelor D si E, (figura 6). Noi am conceput deplasarea degetelor prin intermediul unui mecanism surub-piulita cu pasul de 0,5 mm/rotatie actionat de un motor electric de curent continuu tip S2-20s 12 Vcc Germania.
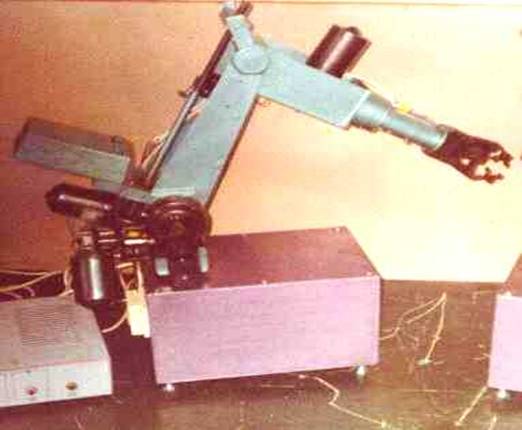
Structura mecanica a robotului antropomorf propus (figura 7), a fost realizata integral
din OL60 care are o buna elasticitate la solicitari dinamice .
3 Comanda unui modul de actionare
Pentru stabilirea performantelor necesare motorului electric de actionare fiecare cupla cinematica conducatoare s-a tratat separat, ca un sistem mecanic izolat, compus dintr-un motor, o transmisie mecanica si un consumator 3].
Pentru fiecare cupla cinematica conducatoare actionata de motorul electric rotativ, se impune ca la nivelul arborelui motor sa se dezvolte in orice moment al miscarii o putere capabila, PM, care prin momentul creat sa invinga momentele rezistente: de inertie, de frecare si tehnologice.
PM Pred
cu
si M M
M red
3.1)
cu unde:
Pred
M red
M red
M redg M redfr M redin
(3.2) (3.3)
Mredg momentul rezistent redus al fortelor gravitationale;
Mredfr momentul rezistent redus al fortelor de frecare;
Mredin momentul rezistent redus al fortelor de inertie.
De asemenea, momentul redus Mred mai este dat si de expresia:
unde
1
M red
M
n
![]()
j i 1
G j v j cos
(3.4)
M viteza unghiulara a arborelui motorului electric;
G j forta gravitationala a elementului j;
V j viteza centrului de greutate a elementului j;
j unghiul de presiune aferent fortei G j
unde
Valoarea maxima a sumei din relatia (3.4) se obtine considerand:
G GR GM (3.5)
GR greutatea robotului;
GM greutatea maxima ce o poate manipula robotul.
Momentul rezistent redus al fortelor de frecare se determina cu relatia:
![]() 1
1
M redfr
M
n
a
j i 1
Ffr V j
n
k m
M (3.6)
fr k
unde in cupla de rotatie
F fr
N
(3.7)
reprezinta coeficientul de frecare la alunecare, iar N reactiunea normala din cupla). Momentul rezistent redus al fortelor de inertie se determina din relatia:
cu
M redin
J red M (3.8)
unde
1
w![]()
J red 2
M
a
j i
n
j j
m v
2
k i
J 2 (3.9)
k k
Jred momentul de inertie masic redus;
M acceleratia unghiulara a arborelui motor;
mj masa elementului j, concentrata in centrul de greutate, aflat in miscarea de translatie;
j j k
J m d 2
3.10)
![]()
![]() Jk momentul
de inertie masic al elementului k in
raport cu axa de rotatie.
Jk momentul
de inertie masic al elementului k in
raport cu axa de rotatie.
![]() M M KT
M M KT
M
h
K
1 2 K V j K
 K - coeficient subunitar;
K - coeficient subunitar;
3.11)
T - timpul de efectuare a miscarii relative a elementelor cuplei cinematice conducatoare;
h cursa liniara a miscarii relative a elementelor in miscarea de translatie;
Vj - viteza liniara in cupla cinematica de translatie.
In cazul de fata nu avem miscare de translatie.
Figura 8.
Pentru robotul realizat s-a considerat ca momentul redus cel mai mare se realizeaza in cupla B a bratului 2 (figura 3), deoareceeste cupla pe care se sprijina
intreaga greutate a acestuia.Astfel, in aceasta cupla s a obtinut un moment necesarMred
=7612,92 [daN.cm] si un moment motor necesar la arborele motorului electric :
M
M red
M i
1,59 daN.cm] 3.12)
Pentru a invinge momentul redus Mred =7612,92 [daN.cm] am utilizat doua
reductoare melc-roata melcata cu raportul de transmitere i = i13 i12 i23 4788.
In functie de aceste cerinte s-a ales un motoreductor de curent continuu tip EP-401-
12Vcccu raportul de transmitere al reductorului i12 = 38 si puterea la arborele melcului de
40 W.
Acest motoreductor are un gabarit redus, fiabilitate mare, posibilitati de a regla turatia pentru limitele de putere cerute de robot. Totodata permite inversarea sensul de miscare in aceiasi parametri.
Schema bloc a actionarii fiecarui modul de actionare este identica si se prezinta in figura 8.
Controlul pozitiei fiecarei cuple motoare s a asigurat prin calculator, iar ca traductor de pozitie s a utilizat un traductorincremental cu furca optica montat pe axa de rotatie a fiecarui modul. In figura 8 se prezinta schema bloc a actionarii celor cinci module din componenta robotului industrial realizat de autori.
Comanda efectiva a robotului s-a realizat printr-un PC 686 - MX - PR 233 ce este programat in limbaj G.
Eroarea de pozitionare
poz
este data de relatia:
unde
poz
c s com 3.13)
poz
c
s
com
eroarea de pozitionare;
eroarea de calcul;
eroarea sistemului fizic de masura;
eroarea de comanda.
Prin solutiile adoptate 8numere reprezentate in dubla precizie, compensarea jocurilor
pe axa, sistemul de masura ales, etc.) c
si s sunt neglijabile in raport cu com asadar:
poz
com 3.14)
Interes practic prezinta:
unde
cu
poz max
com max
com max
v max ti max
v max Ts
3.15)
3.16)
ti max
Ts
timpul de intarziere;
constanta de timp a sistemului incluzand si calculatorul).
4 Concluzii
Robotul realizat de autori a fost testat in cadrul laboratorului de mecanisme si roboti
Industriali si are urmatoarele caracteristici geometrice si parametri functionali:
unghiul de rotatie al modulului 1 - 2700
unghiul de rotatie al modulului 2 - 400
unghiul de rotatie al modulului 3 - 1300
unghiul de rotatie al modulului de orientare - 2700
raza maxima de pozitionare a sarcinii manipulate - 760 mm;
raza minima de pozitionare a sarcinii manipulate - 310 mm;
masa maxima a sarcinii manipulate - 250 grame;
masa totala a bratului robotului (brat+contragreutate) - 28500 grame.
viteza de rotatie a modulului 1 - 30 rot/min;
viteza de rotatie a modulului 2 - 0,5 rot/min;
viteza de rotatie a modulului 3 - 10 rot/min;
viteza de rotatie a modulului de orientare - 20 rot/min;
5. Bibliografie
www.wikipedia.org - informatii mecanism
www.google.ro - poze mecanism