|
|
|
|
Elementele sistemelor de actionari hidraulice si electrohidraulice . Motoare hidraulice. Servovalve electrohidraulice. Servomecanisme de pozitie si viteza
1. Principii constructive si functionale
Motoarele hidraulice se folosesc ca elemente de executie in cadrul sistemelor hidraulice si electrohidraulice de actionare si formeaza partea finala, de putere, avand un dublu rol, informational si de vehiculare a unor puteri importante de la sursa de energie hidraulica la sarcina.
Functionarea acestora se bazeaza pe transformarea energiei potentiale a fluidului sub presiune in energie mecanica de deplasare rectilinie alternativa sau de miscare de rotatie a elementului actionat. In cadrul sistemelor automate electrohidraulice, se adopta pentru elementele de executie hidraulice principii constructive si functionale care sa le ofere urmatoarele caracteristici de baza:
sa asigure un raport putere-greutate foarte mare
sa aiba o amplificare in presiune ridicata
sa dezvolte forte sau cupluri si viteze de actionare compatibile cu cerintele sarcinii
sa aiba caracteristici de accelerare si decelerare cat mai apropiate si constante pe tot domeniul de functionare
Elementele de executie liniare asigura o miscare de translatie cu o viteza constanta a sarcinii si o mare frecventa de inversare a sensului de actionare.
 Elementele de
executie rotative asigura o mare stabilitate a miscarii,
intr-un domeniu larg de variatie a marimilor de iesire
(0.1rot/min - 3000rot/min) si un raport cuplu activ-moment de inertie
superior actionarilor electrice de aceeasi putere. Din punct de
vedere constructiv, elementele de executie hidraulice se realizeaza
intr-o gama relativ larga de tipodimensiuni, pentru presiuni cuprinse
intre 210 si 800 bar, debite pana la 800l/min si puteri
pana la 3500kW, asigurand cupluri active pana la 8000-9000Nm.
Datorita acestor calitati, elementele de executie
hidraulice au o mare utilizare in aplicatiile care necesita
forte sau cupluri mari, cum ar fi: constructia de masini-unelte,
tehnica aerospatiala si navala, in industria
siderurgica pentru actionarea laminatoarelor, in transport,
masini agricole, masini de ridicat, rorbotica, reglarea
turbinelor hidraulice si termice. Elementele de executie liniare se
numesc motoare volumice liniare (cilindri hidraulici). O reprezentare
axonometrica a acestor motare este data in figura 1.
Elementele de
executie rotative asigura o mare stabilitate a miscarii,
intr-un domeniu larg de variatie a marimilor de iesire
(0.1rot/min - 3000rot/min) si un raport cuplu activ-moment de inertie
superior actionarilor electrice de aceeasi putere. Din punct de
vedere constructiv, elementele de executie hidraulice se realizeaza
intr-o gama relativ larga de tipodimensiuni, pentru presiuni cuprinse
intre 210 si 800 bar, debite pana la 800l/min si puteri
pana la 3500kW, asigurand cupluri active pana la 8000-9000Nm.
Datorita acestor calitati, elementele de executie
hidraulice au o mare utilizare in aplicatiile care necesita
forte sau cupluri mari, cum ar fi: constructia de masini-unelte,
tehnica aerospatiala si navala, in industria
siderurgica pentru actionarea laminatoarelor, in transport,
masini agricole, masini de ridicat, rorbotica, reglarea
turbinelor hidraulice si termice. Elementele de executie liniare se
numesc motoare volumice liniare (cilindri hidraulici). O reprezentare
axonometrica a acestor motare este data in figura 1.
Principiul de functionare al acestora consta in transformarea energiei de presiune a lichidului furnizat de o pompa volumica, in energie mecanica asociata unei miscari de translatie necesara pentru actionarea sarcinii.
Fiind larg utilizati in diverse sisteme de actionare, cilindrii hidraulici se produc in serie, cataloagele producatorilor furnizand informatii privind: cursa, vitezele si fortele ce pot fi dezvoltate la anumite debite si respectiv presiuni de lucru.
Cilindrii hidraulici se executa curent pentru presiuni cuprinse intre 20 si 400 bar, limita superioara fiind de circa 2000bar. Diametrele nominale variaza intre 10 si 600mm, in cazul preselor hidraulice atingand 1400mm. Cursele sunt cuprinse intre 10 si 6000mm, in cazul instalatiilor hidroenergetice atingand 18000mm.
O problema importanta care apare in functionarea cilindrilor este franarea acestora la cap de cursa. Aceasta apare atunci cand viteza pistoanelor este mai mare de 20 mm/sec si la actionarea unor sarcini mari, ducand la scoaterea din functiune prin lovirea repetata a capacelor. Acest proces poate fi evitat prin franarea pistoanelor la cap de cursa prin mijloace mecanice sau hidraulice.
Cele mai raspandite procedee de franare se bazeaza pe introducerea unei rezistente hidraulice in circuitul de evacuare a lichdului din cilindru, avand ca efect cresterea presiunii pe suprafata pasiva a pistonului si franarea acestuia.
Motoarele hidraulice rotative transforma energia de presiune a lichidului furnizat de o pompa prin anumite camere de volum variabil realizate sub diferite forme. In practica se utilizeaza mai multe variante constructive in domenii specifice de momente si turatii.
Clasificarea motoarelor rotative se poate face dupa mai multe criterii. Unul dintre acestea il constituie mecanismul care creeaza camerele de volum variabil in functie de care se deosebesc:
motoare rotative cu pistoane axiale
motoare rotative cu pistoane radiale
motoare rotative cu roti dintate
motoare rotative cu palete culisante
motoare orbitale.
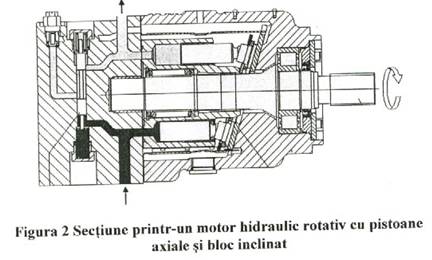 Elementele de executie
hidraulice cu miscare de rotatie cele mai raspadite in tehnica
reglarii automate sunt motoarele hidraulice cu pistoane axiale, care
prezinta performante dinamice si energetice superioare comparativ
cu alte variante constructive datorita distributiei simetrice a
elementelor mobile fata de axa de rotatie. In figura 2 se
prezinta schema de principiu a unui motor hidraulic rotativ cu pistoane
axiale si bloc inclinat.
Elementele de executie
hidraulice cu miscare de rotatie cele mai raspadite in tehnica
reglarii automate sunt motoarele hidraulice cu pistoane axiale, care
prezinta performante dinamice si energetice superioare comparativ
cu alte variante constructive datorita distributiei simetrice a
elementelor mobile fata de axa de rotatie. In figura 2 se
prezinta schema de principiu a unui motor hidraulic rotativ cu pistoane
axiale si bloc inclinat.
Dintre performantele statice si dinamice amintim:
rigiditate hidraulica superioara motoarelor hidraulice liniare, datorita volumului mic de ulei din interiorul motorului
 gabarit mic pe
unitatea de putere
gabarit mic pe
unitatea de putere
randament hidraulic ridicat, datorita pierderilor volumice foarte mici.
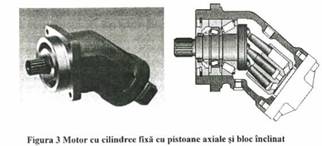
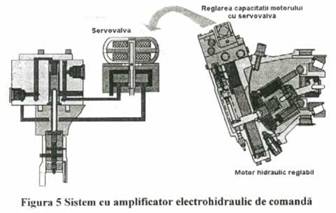
Un alt tip de motor cu utilizare larga este motorul cu pistoane axiale si bloc inclinat, cu debit constant, figura 3, si cu debit variabil, figura 4. Sistemul de comanda este prezentat in figura 5.

2. Constructia servovalvelor electrohidraulice
Servovalvele sunt aparate de reglare care convertesc o marime electrica de intrare (curent electric) intr-o marime de iesire (debit sau presiune) realizand intre acestea o dependenta strict proportionala in regim stationar, in conditiile unei caderi de presiune constante pe muchiile de comanda.
Semnalele de intrare de mica putere (de ordinul zecilor de W) comanda puteri mari si foarte mari la iesire (de ordinul zecilor sau sutelor de kW), servovalvele realizand factori de amplificare in putere foarte mari (104105). Se intalnesc sub diferite variante constructive.
Servovalvele realizeaza conversia unor semnale electrice de mica putere aplicate la intrare intr-o deplasare mecanica a unui sertar hidraulic in conditiile satisfacerii unor cerinte inalte de performanta si anume:
un domeniu de liniaritate cat mai mare;
o viteza de raspuns ridicata;
un histerezis cat mai mic;
un consum propriu de energie redus;
o buna fiabilitate in functionare.
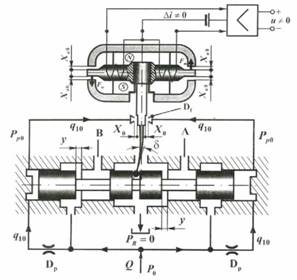
Convertorul electromecanic este un motor de cuplu cu magneti permanenti, de tip diferential, lucrand in mediu uscat. Armatura mobila a motorului de cuplu este solidara cu paleta preamplificatorului ajutaj-paleta. Paleta se continua cu un arc lamelar (resort de reactie) sub forma conica. Capatul sau sferic este introdus cu joc minim intr-un canal circular al sertarului hidraulic.
Motorul de cuplu asigura pozitionarea paletei in raport cu cele doua duze. Reactia negativa de la sertarul hidraulic se realizeaza prin intermediul arcului lamelar. Reactia de pozitie la sertar este resitita ca reactie de forta la motorul de cuplu, deoarece deplasarea sertarului in raport cu pozitia sa de zero deformeaza elastic arcul lamelar de reactie conducand la aparitia unui cuplu rezistent care contribuie la echilibrarea cuplului motor.
Aplicarea unui semnal de comanda diferential celor doua bobine ale convertorului electromagnetic (Δi - curent diferential) produce polarizarea armaturii si aparitia unor forte magnetice. In urma interactinunii cu campul magnetic (datorat magnetilor permanenti) al pieselor polare se va produce o rotire a armaturii in sens trigonometric.
Prin urmare, presiunea diferentiala de pilotare, pentru noua pozitie stationara a sertarului, va avea valori foarte mici si deci paleta se va afla intr-o pozitie foarte apropiata de pozitia de zero. De asemenea armatura si tubul flexibil vor revenii intr-o pozitie foarte apropiata de pozitia de zero. In aceasta pozitie momentul dat de forta elastica a resortului de reactie este egalat de momentul activ dat de curentul de intrare. Acest lucru constituie un avantaj deoarece tubul flexibil va suporta deformatii foarte mici. Deci deplasarea sertarului este proportionala cu curentul de intrare.
In absenta unui semnal de comanda, sertarul se afla in pozitia de zero si obtureaza orificiile de distributie din carcasa amplificatorului. La aparitia unui semnal de comanda, in camerele preamplificatorului ajutaj-paleta apare o presiune diferentiala care se plaica pe capetele sertarului, oar aceasta are o deplasare liniara in interioara carcasei, realizand diferite combinatii intre porturile de comanda si alimentare, in functie de semnalul caderii de presiune.
Intre sertar si paleta preamplificatorului se realizeaza o legatura de reactie mecanica prin intermediul unui arc filiform avand o forma de solid de egala rezistenta, care se termina la capatul dinspre sertar cu o bila. La disparitia semnalului de comanda la convertorul electromagnetic sertarul revine in pozitia de zero, obturand conexiunile intre porturile A, B si Ps, T. La aparitia unui semnal de comanda sertarul aplificatorului de putere se va deplasa intr-un sens sau altul cu o deschidere proportionala si va comanda cespunzator debitul motorului hidraulic si implicit viteza de rotatie a acestuia.
3. Determinarea experimentala a caracteristicii de comanda Ωm=f(Δi) pentru un motor hidraulic rotatic vare are debitul specific qm=14 cm3/rot
sin(wt)
-50
-40
-30
-20
-10
10
20
30
40
50
Umasurat
-2.2
-2
-1.7
-1.3
-0.7
0.5
1.2
1.7
2
2.2
Ut(V)
-6.6
-6
-5.1
-3.9
-2.1
1.5
3.6
5.1
6
6.6
Wnrad/sec
-98.73
-89.75
-76.29
-58.34
-31.41
22.43
53.85
76.29
89.75
98.73
Qmcm3/rad
144.14
131.03
111.38
85.17
45.85
32.74
78.62
111.38
131.03
144.14
qm=14cm3/rot; Kt=![]() ;
;
Qm=qm∙wm ; Mm=qm∙ΔPm;
Tinand cont de scara voltmetrului Ut se afla inmultind valorile din table cu 3.
Wn=![]() si se obtin valorile din tabel. Se foloseste
transformarea rot=30/πrad.
si se obtin valorile din tabel. Se foloseste
transformarea rot=30/πrad.
4. Studiul servomecanismelor electrohidraulice de pozitionare liniara. Determinarea experimentala a conditiei de stabilitate
Se mai numesc servomecanisme electrohidraulice deoarece marimea de iesire este de natura unei deplasari liniare sau unghiulare. Se utilizeaza in numeroase aplicatii practice intalnite in special in automatizarea proceselor de fabricatie, in robotica industriala, in aplicatii militare, aerospatiale, in conducerea aparatelor directoare ale turbinelor termice si hidraulice din centrale. Acest sistem are schema de principiu in figura:
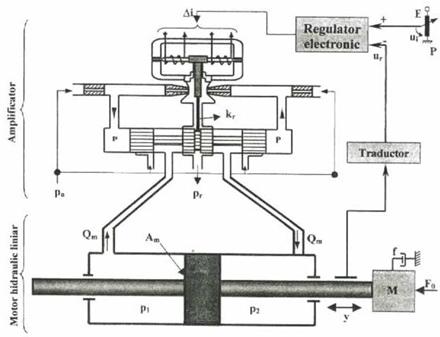
Δi=i2-i1≥0
Am = aria motor
y = deplasarea tijei
uf = deplasarea in volti
Δp = p1-p2
p0 = racordurile la sursa de energie hidraulica
5. Acordarea regulatoarelor electronice prin simulare numerica
 Aplicand
criteriul lui Nyquist observam din grafic ca sistemul se afla la
limita stabilitatii(Kv=2ζwn) pentru
valorile :
Aplicand
criteriul lui Nyquist observam din grafic ca sistemul se afla la
limita stabilitatii(Kv=2ζwn) pentru
valorile :
ζ=0.5 si wn=40rad/sec
>> h=tf([0 0 0 40],[0.000625 0.025 1 0])
Transfer function:
40
0.000625 s^3 + 0.025 s^2 + s
>> nyquist(h)
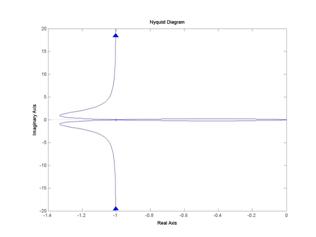
Stabilitatea este pusa in evidenta pentru Kv<2ζwn. Alegem Kv=30
 h=tf([0 0 0 30],[0.000625
0.025 1 0])
h=tf([0 0 0 30],[0.000625
0.025 1 0])
Transfer function:
30
0.000625 s^3 + 0.025 s^2 + s
>> nyquist(h)
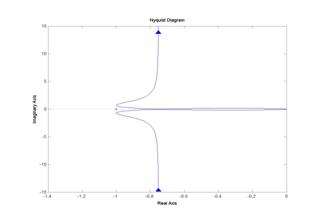
Instabilitatea este pusa in evidenta pentru valori ale ui Kv<2ζwn. Alegem Kv=50
 h=tf([0
0 0 50],[0.000625 0.025 1 0])
h=tf([0
0 0 50],[0.000625 0.025 1 0])
Transfer function:
50
0.000625 s^3 + 0.025 s^2 + s
>> nyquist(h)