|
|
|
|
Erorile girocompaselor
In comparatie cu situatia particulara a unui girocompas plantat cu sistemul sau de suspensie pe suprafata terestra, la o latitudine oarecare (aflat in imobilitate fata de repere terestre), girocompasul amplasat pe un postament solidar cu nava, sufera nu numai influenta miscarii diurne a Pamantului, ci si influenta miscarilor navei (deplasarea intr-un anumit drum, schimbarile de viteza, schimbarile de drum, ruliul si tangajul etc). Aceste miscari ale navei genereaza erori care altereaza directia nord-girocompas (0Ng) in raport cu directia nord adevarat. In functie de cauzele care le provoaca, erorile girocompasului sunt:
eroarea de viteza;
erori de acceleratie (erori balistice);
eroarea de balans;
erori accidentale.
In afara de erorile variabile enumerate mai sus, exista si o eroare constanta de aliniere sau de colimatie; ea consta intr-o deviatie unghiulara permanenta a habitaclului girocompasului fata de axa longitudinala a navei.
1. Eroarea de viteza
In studiul transformarii giroscopului liber in girocompas, s-a
presupus ca giroscopul se gaseste amplasat fix, intr-un punct de
pe Glob, la o latitudine oarecare![]() , iar planul orizontului se roteste in spatiu cu o
viteza unghiulara . Viteza
tangentiala corespunzatoare acestui punct va fi:
, iar planul orizontului se roteste in spatiu cu o
viteza unghiulara . Viteza
tangentiala corespunzatoare acestui punct va fi:
![]() (1.13)
(1.13)
Sa presupunem nava deplasandu-se odata cu girocompasul cu o
viteza v intr-un drum oarecare D (fig.G17). Planul
orizontului legat de nava va executa o miscare circulara in jurul
unei axe perpendiculare pe planul continand centrul Pamantului
si vectorul ![]() . Viteza unghiulara a acestei miscari
circulare este:
. Viteza unghiulara a acestei miscari
circulare este:
![]() (1.14)
(1.14)
in care R este raza Pamantului.
Viteza unghiulara a miscarii circulare a planului orizontului datorata miscarii de rotatie diurne a Pamantului este data de relatia:
![]() (1.15)
(1.15)
Insumand cele doua viteze unghiulare, se obtine viteza unghiulara rezultanta:
![]() (1.16)
(1.16)
Constructia vectorului viteza unghiulara rezultanta se face dupa cum urmeaza:
Vectorul ![]() (viteza
unghiulara a deplasarii navei) se descompune intr-o componenta
aflata in plan ecuatorial (
(viteza
unghiulara a deplasarii navei) se descompune intr-o componenta
aflata in plan ecuatorial (![]() ) si o componenta pe axa polilor (
) si o componenta pe axa polilor (![]() ).
).
Vectorul ![]() nu are componenta
in plan ecuatorial (
nu are componenta
in plan ecuatorial (![]() ).
).
Asadar, componenta din axa polilor a vectorului viteza unghiulara rezultanta este suma:
![]()
Directia vitezei unghiulare rezultante fata de planul meridianului este data de unghiul si pe ea se stabilizeaza axa girocompasului de pe nava aflata in miscare. Aceasta directie se numeste meridian giroscopic.
Fig.G17.Eroarea de viteza a girocompasului
Deviatia meridianului giroscopic fata de meridianul geografic este data de relatia:
![]() (1.17)
(1.17)
Se inlocuiesc vitezele unghiulare cu viteze tangentiale, astfel:
 (1.18)
(1.18)
Deoarece viteza navei este data in noduri (Mm/h), trebuie exprimata si viteza tangentiala a Pamantului la Ecuator, in aceeasi unitate de masura. Viteza unghiulara de rotatie a Pamantului este:
Raza Pamantului la Ecuator este R = 6378,388 km.
Valoarea unei mile marine este 1Mm = 1853,18 m
Rezulta raza Pamantului, in mile marine:
![]()
Asadar, viteza tangentiala a Pamantului la Ecuator este:
![]()
Inlocuind in (1.18), se obtine:
![]() (1.19)
(1.19)
Deoarece are valori foarte mici, tangenta poate fi substituita cu marimea arcului (unghiului), iar viteza tangentiala a Pamantului la Ecuator se aproximeaza la 900 Nd si astfel:
![]() (1.20)
(1.20)
Se poate concluziona ca:
eroarea girocompasului datorata vitezei navei (g) nu depinde de parametri constructivi ai girocompasului si se poate calcula indiferent de tipul lui;
eroarea de viteza se calculeaza permanent - ea creste odata cu latitudinea si este proportionala cu viteza navei
eroarea este maxima in drumurile de nord (00) si sud (1800);
eroarea este nula in drumurile de est (900) si vest (2700).
2. Erorile balistice ale girocompasului
In timpul manevrei de intoarcere a navei, se produc variatii bruste de drum si viteza. Ele imprima girocompasului accceleratii care dau nastere unor miscari de precesie in jurul axei principale, numite precesii balistice. Odata cu variatia drumului si a vitezei navei, se produce si variatia erorii de viteza, adica deplasarea meridianului giro fata de pozitia initiala, intr-un anumit sens determinat de caracterul intoarcerii navei.
Intr-adevar, considerand latitudinea constanta, vom avea pentru un anumit drum initial D1 si o viteza initiala v1, eroarea de viteza:
![]() (1.21)
(1.21)
careia ii corespunde meridianul giro Ng1
In noul drum D2 si pentru noua viteza v2, la terminarea manevrei, vom avea o alta eroare de viteza:
![]() (1.22)
(1.22)
careia ii corespunde un alt meridian giro Ng2, deplasat unghiular in sensul in care s-a deplasat meridianul giro (fig.G18).
In principiu, pentru a asigura orientarea mai rapida a axei principale in noua pozitie de echilibru (noul meridian giro), se dezactiveaza dispozitivul de amortizare al oscilatiilor inainte de inceperea manevrei de schimbare de drum si se cupleaza din nou dupa ce aceasta s-a terminat. Totusi, amortizarea oscilatiilor se face destul de incet si axa principala revine in noul meridian giro intr-un interval de timp mult mai mare (1..2h) decat durata manevrei (cateva minute).
In urma miscarii de precesie balistica, axa principala a girocompasului poate ocupa, la terminarea manevrei, una din urmatoarele trei pozitii, in raport cu noul meridian giro:
a) coincide cu noul meridian giro, deplasandu-se impreuna cu acesta, daca viteza precesiei balistice este egala cu viteza de deplasare a meridianului giro; evident, valoarea erorii balistice este zero;
b) depaseste meridianul giro, daca viteza precesiei balistice este mai mare decat viteza de deplasare a meridianului giro;
c) ramane in urma meridianului giro, deplasandu-se mai putin decat acesta, daca viteza precesiei balistice este mai mica decat viteza de deplasare a meridianului giro.
In functie de aceste situatii, trecerea axei principale a girocompasului in noua pozitie de echilibru poate fi:
aperiodica (fara oscilatii) in cazul a) si
periodica (cu oscilatii) in cazurile b) si c).
Evident, cea mai avantajoasa trecere a axei principale in pozitia de echilibru, in ceea ce priveste precizia si stabilitatea girocompasului, este cea aperiodica.
3. Eroarea de balans
Acest tip de eroare se produce la ruliu si la tangaj, atunci cand punctul de suspensie al girocompasului capata o acceleratie a carei perioada este foarte mica (6.15s) in comparatie cu perioada oscilatiilor girocompasului (1.2h). Valoarea maxima a acceleratiei in cazul ruliului sau al tangajului este mult mai mare decat in timpul intoarcerii navei.
Valoarea erorii de balans depinde de latitudinea si amplitudinea tangajului sau a ruliului. Ea creste proportional cu amplitudinea balansului.
Practic, eroarea de balans se inlatura prin utilizarea unui sistem format din doua giroscoape cuplate printr-un sistem de parghii antiparalelogram, astfel incat axele lor sa faca intre ele un unghi de 900 in lipsa precesiei.
Giroscoapele (giromotoarele) sunt incasetate intr-o girosfera al carei centru de greutate este coborat sub centrul ei geometric, ceea ce ii confera efectul pendular.
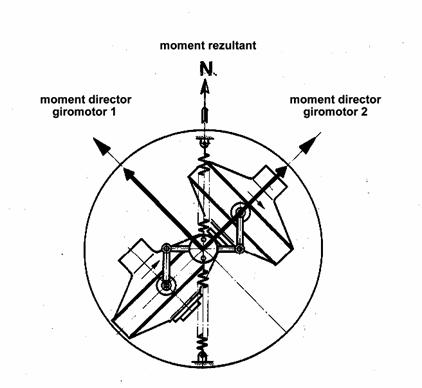
Fig.G19Diminuarea erorilor de balans
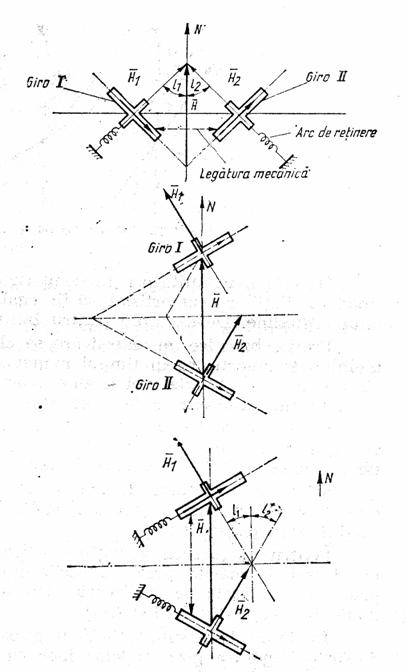
Legatura giromotoarelor face ca momentul cinetic al ansamblului sa ramana constant.