|
|
|
|
Romanian Maritime Training Centre 'CERONAV' Constanta
Curs de perfectionare pentru promovare sef electrician
MASINA ASINCRONA
Regimuri de functionare
Modalitati de reglare a turatiei
Datorita avantajelor constructive si de exploatare pe care le prezinta motorul asincron fata de celelalte motoare, in ultimii ani s-au facut ample cercetari privind reglarea vitezei acestora. Unele metode, devenite clasice, sunt in curs de extindere deoarece asigura indici de calitate comparabili cu cei ai actionarilor cu motoare de curent continuu.
a) metode specifice motoarelor asincrone cu rotorul in scurtcircuit, la care comanda se face in stator:
modificarea numarului perechilor de poli ai statorului;
modificarea amplitudinii tensiunii de alimentare a statorului;
modificarea frecventei tensiunii de alimentare a statorului;
modificarea simultana si corelata a amplitudinii si frecventei tensiunii de alimentare a statorului;
modificarea impedantei statorice;
b) metode specifice motoarelor asincrone cu rotorul bobinat, la care comanda se face in rotor:
modificarea impedantei circuitului rotoric;
introducerea unei tensiuni auxiliare in circuitul rotoric.
Pentru alegerea metodei de reglare a vitezei se considera cunoscuta caracteristica statica a masinii de lucru Ms =f( Ω ). Se calculeaza viteza Ωnat la care ar functiona actionarea pe caracteristica mecanica naturala a motorului asincron si se compara cu viteza Ωs impusa prin procesul tehnologic.
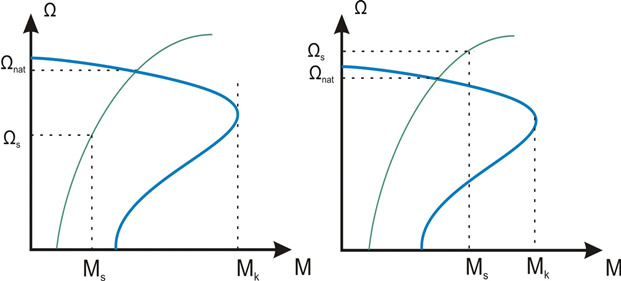
Figura 1
Daca Ωnat> Ωs se va adopta una dintre urmatoarele metode:
. modificarea amplitudinii tensiunii de alimentare
daca ![]() ;
;
. modificarea numarului de perechi de poli daca ![]() ;
;
. modificarea impedantei circuitului rotoric (rezistenta sau reactanta) daca
![]() ;
;
. introducerea unei tensiuni auxiliare in circuitul rotoric
daca ![]() ,
iar tensiunea nominala a motorului este mai mare de 380 V;
,
iar tensiunea nominala a motorului este mai mare de 380 V;
. alimentarea motorului de la un convertor static
daca ![]() .
.
Principial se pot adopta si alte metode (ex. cuplarea in cascada a doua motoare asincrone), dar acestea sunt cazuri particulare pentru a caror aplicare trebuie facuta o analiza speciala.
Daca Ωnat< Ωs se va adopta una dintre urmatoarele solutii:
. se alege un motor cu turatia de sincronism mai mare;
. modificarea numarului de perechi de poli daca
![]() ;
;
. modificarea frecventei tensiunii de alimentare;
. introducerea unei tensiuni auxiliare in circuitul rotoric.
Reglarea vitezei prin modificarea numarului de perechi de poli
Pentru determinarea tensiunii de alimentare U1x , se particularizeaza ecuatia caracteristicii statice pentru punctul de functionare stationara impus (MS , ΩS ).
Se calculeaza mai intai alunecarea corespunzatoare:
apoi
unde sk - alunecarea critica pe caracteristica mecanica naturala
De aici
![]()
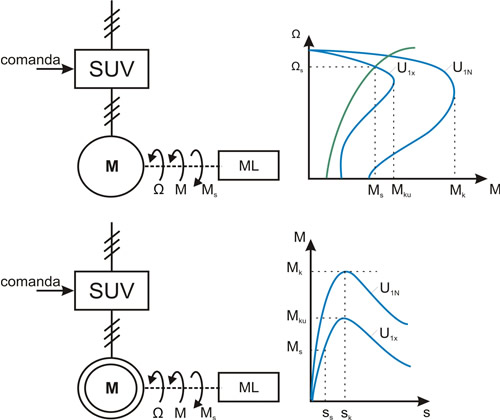
Figura 4
SUV - sursa de tensiune variabila.
Din proprietatile caracteristicilor mecanice rezulta
![]()
iar in final
![]()
Din conditia Mku = MN sau Mku = Ms se obtine cea mai mica tensiune cu care poate fi alimentat motorul pentru a exista un punct de functionare stationara.
![]()
sau
![]()
Daca Ωs > Ωnat , reglarea vitezei se face prin alimentare cu frecventa f1X >f1N.
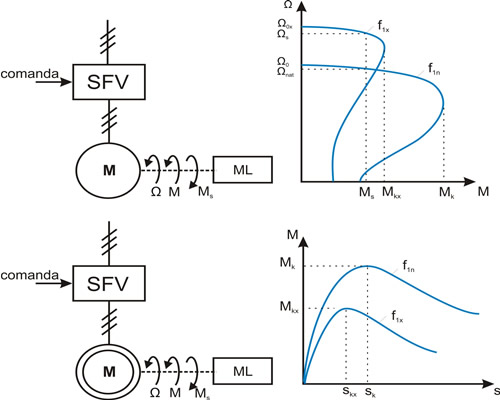
Figura 5
Din ipoteza ca cele doua caracteristici mecanice sunt paralele intre ele, se pot scrie rapoartele:
![]() .
.
De aici
![]()
In final rezulta:
![]()
Daca Ωs < Ωnat atunci f1X < f1N . Deoarece reducerea frecventei determina saturarea masinii, este necesara reducerea simultana si a tensiunii de alimentare, reglarea vitezei facandu-se pe caracteristici combinate de tensiune si frecventa.
Reglarea vitezei prin alimentarea cu tensiune si frecventa variabila
Principiul de determinare a parametrilor se bazeaza pe ipoteza ca cele doua caracteristici mecanice sunt paralele in portiunea liniara si deci
![]()
De aici
![]()
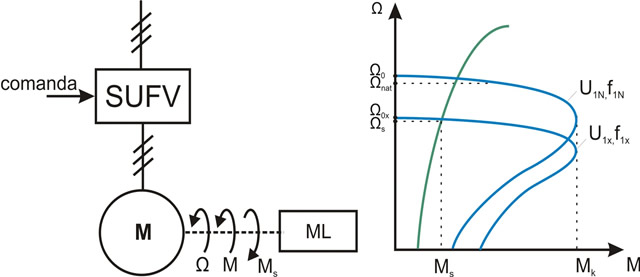
Figura 6
Daca reglarea vitezei se face la cuplu constant, atunci
![]()
In final se obtine:
![]()
Pentru a obtine rezultate mai exacte se poate utiliza o metoda iterativa (in care rezultatele de mai sus reprezinta primul pas) si expresii analitice in care frecventa apare explicit.
Reglarea vitezei prin modificarea rezistentei rotorice
Pentru determinarea rezistentei suplimentare R2S se particularizeaza ecuatia caracteristicii mecanice reostatice pentru punctul de functionare impus (MS , ΩS ).
Se calculeaza alunecarea
![]()
si se particularizeaza ecuatia caracteristicii statice
![]()
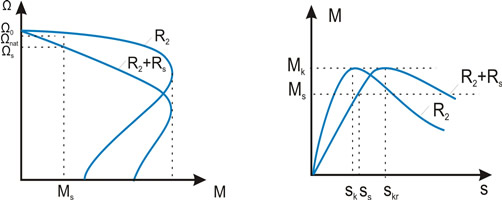
Figura 7
De aici
Din proprietatile caracteristicilor statice se obtine rezistenta suplimentara
![]()
Desi metoda prezinta o serie de dezavantaje, dintre care cel mai important este legat de pierderile de energie pe rezistenta suplimentara, ea se utilizeaza in multe aplicatii pentru motoare de putere mare alimentate la 6 kV, dar si pentru motoare de joasa tesiune. Unele dezavantaje clasice, legate de dimensiunile de gabarit, fiabilitatea redusa datorita conexiunilor multiple, dificultatile de introducere intr-un sistem automat, au fost diminuate sau eliminate prin solutii tehnologice moderne, cum ar fi "reostatul electronic".
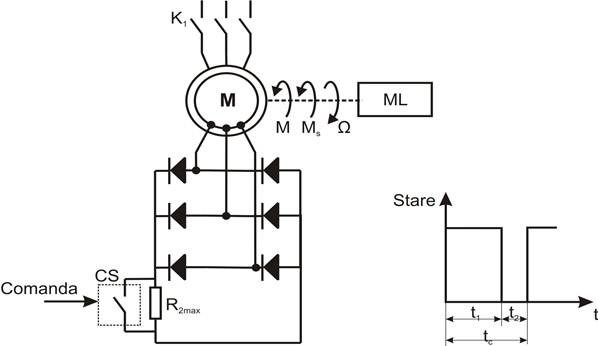
Figura 8
Contactorul static este comandat cu factor de semnal variabil
![]()
iar rezistenta medie
R2med. = ( 1- a ) R2max.
Rezistenta R2max se calculeaza pentru a asigura pornirea, iar factorul de semnal a pentru reglarea vitezei din conditia:
R2S = ( 1- a ) R2max.
Rezulta
![]()