|
|
|
|
Motorul de curent continuu folosit in prima parte antreneaza un generator sincron care furnizeaza putere reactiva in sistemul industrial.
Motoarele sincrone cu puteri nominale de la 100kW la 12000kW utilizate, in special, in industria petrochimica reprezinta cele mai mari motoare electrice.
Datorita parametrilor energetici superiori (randament, si cosj), motoarele sincrone au primit o larga utilizare in actionarile de mare putere. Avantajul principal al motorului sincron fata de alte tipuri de motoare consta in faptul ca poate furniza putere reactiva in reteaua de alimentare, imbunatatind factorul de putere al intreprinderilor. Ca urmare a imbunatatirii factorului de putere se reduc pierderile de energie electrica in reteaua de alimentare.
Problema care se pune in prezent, la
actionarile cu motoare sincrone care functioneaza cu
sarcina variabila, consta in stabilirea reglajului automat
optim al excitatiei motorului
sincron, care sa conduca la pierderi minime de putere activa
pentru puterea reactiva furnizata. Daca cuplul rezistent la
arborele motorului sincron variaza periodic, puterea reactiva
furnizata de motorul sincron cu excitatie
Variatia puterii reactive furnizata de motorul sincron pe o perioada Tp de variatie a cuplului rezistent se poate exprima astfel:
Daca puterea reactiva, Qi, ar
ramane
![]()
unde: ai si bi sunt constante ale motorului si a liniei.
Pierderea medie pe o perioada Tp este:
In cazul in care se introduce un sistem de reglare
automata a excitatiei care mentine puterea reactiva la
valoare
Se considera urmatoarea schema bloc:
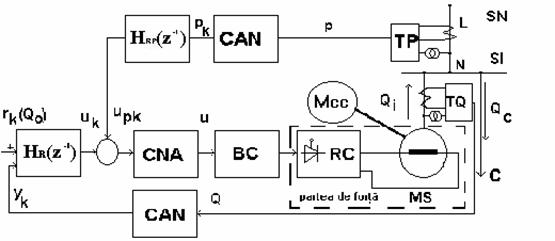
Figura 8.1 - schema bloc a SRA numeric a puterii reactive
In aceasta figura se prezinta o structura a sistemului de reglare automata numerica a puterii reactive a motorului sincron, care asigura mentinerea puterii reactive la o valoare de referinta Q0, care este furnizata de un calculator coordonator al sistemului electro-energetic industrial SI si totodata asigura compensarea variatiilor de sarcini reactive ale consumatorilor C racordati in nodul de compensare N al sistemului. Eficienta economica acestei reglari consta in reducerea pierderilor de putere activa pentru puterea reactiva Q produsa de motorul sincron, care rezulta din consideratiile teoretice prezentate in continuare.
In figura 8.1 se prezinta structura sistemului de reglare numeric organizat pe doua blocuri de reglare:
un regulator de reglare numerica R, al puterii reactive, care functioneaza pe calea directa si prelucreaza eroarea sistemului e=Q0-Q unde Q - este puterea reactiva produsa de motor, respectiv marimea reglata; furnizand un semnal de comanda u pentru reglarea excitatiei masinii sincrone MS.
un regulator de reglare directa (feedforward) dupa perturbatia masurabila RP, care tine seama de perturbatiile introduse de consumatorii C in nodul energetic N si pe linia L de racord al sistemului industrial SI cu sistemul national SN.
Functia de transfer a procesului include blocul de comanda electronica BC, redresorul comandat cu tiristoare, motorul sincron MS si traductorul de putere reactiva TQ. Prin identificarea procesului s-au identificat functia de transfer a partii fixe:
 Xp=6;
Xp=6;
Discretizand aceasta functie de transfer cu metoda dreptunghiului se obtine:
![]()